занимаюсь проектировкой подвесов с его электроникой,
И как они ведут себя в полете?
|
|

 #241
#241
Опытный летчик АС

Отправлено 20 February 2015 - 10:49 PM
занимаюсь проектировкой подвесов с его электроникой,
И как они ведут себя в полете?
#242
Летчик АС


Отправлено 20 February 2015 - 11:47 PM
И как они ведут себя в полете?
Изумительно!
#243
Опытный летчик АС
Отправлено 20 February 2015 - 11:56 PM
Изумительно!
Даааа? ну каждый кулик хвалит свое болото)))))
Вот убедится бы как?
#244
Отправлено 22 February 2015 - 11:26 AM
Видео по установке Walkera G-3D на DJI Phantom 2
#245
Летчик со стажем

Отправлено 22 February 2015 - 11:21 PM
#246
Опытный летчик АС
Отправлено 23 February 2015 - 12:13 AM
У меня ГоПро стоит, и по весу и по размеру идеально с акб стоит.
#247
Летчик со стажем
Отправлено 23 February 2015 - 12:39 AM
У меня ГоПро стоит, и по весу и по размеру идеально с акб стоит.
#248
Опытный летчик АС
#249
Летчик испытатель

Отправлено 24 February 2015 - 04:18 PM
Попробовал сейчас подключить к F1 и F2 Назы.
Поэкспериментировал. Можно даже добиться, чтобы наклон камеры регулировался через Назу, хотя где-то читал, что не получится.
Но все равно, подвес себя как-то странно ведет.
В итоге, подключил напрямую к 5 каналу приемника, а от Назы отключил и выключил в ассистенте управлениие.
Так мне показалось проще и лучшее.
#250
Летчик

Отправлено 24 February 2015 - 06:58 PM
У меня почти аналогичный подвес, DYS серии.
Пока собрал его на столе, работает с камерой Canon EOS-M почти идеально, контроллер 8 битный с расширительной платой.
Но есть вопрос слежения по курсу, включен режим следования по YAW, но иногда при резких движениях верхний третий мотор перепрыгивает через полюса и его необходимо возвращать на место руками. Есть ли возможность решить эту проблему. Например, в полёте при резком развороте по курсу вернуть его на место уже невозможно, понимаю, что можно подключить третью ось к пульту и управлять ей.
#251
Летчик испытатель
Отправлено 24 February 2015 - 09:42 PM
мотор перепрыгивает через полюса и его необходимо возвращать на место руками.
Вот меня тоже этот вопрос интересует. Более точной балансировкой и настройкой удалось почти избавиться от этого недуга, но все равно, иногда проскакивает.
Завтра должен прийти более мощный мотор, посмотрим, спасет ли это.
Если нет, то придется покупать 32битный контроллер. Там 2 IMU. Один из которых можно поставить для слежения по YAW
Мои настройки выглядят так. Немного странно, по сравнению с примерами в интернете
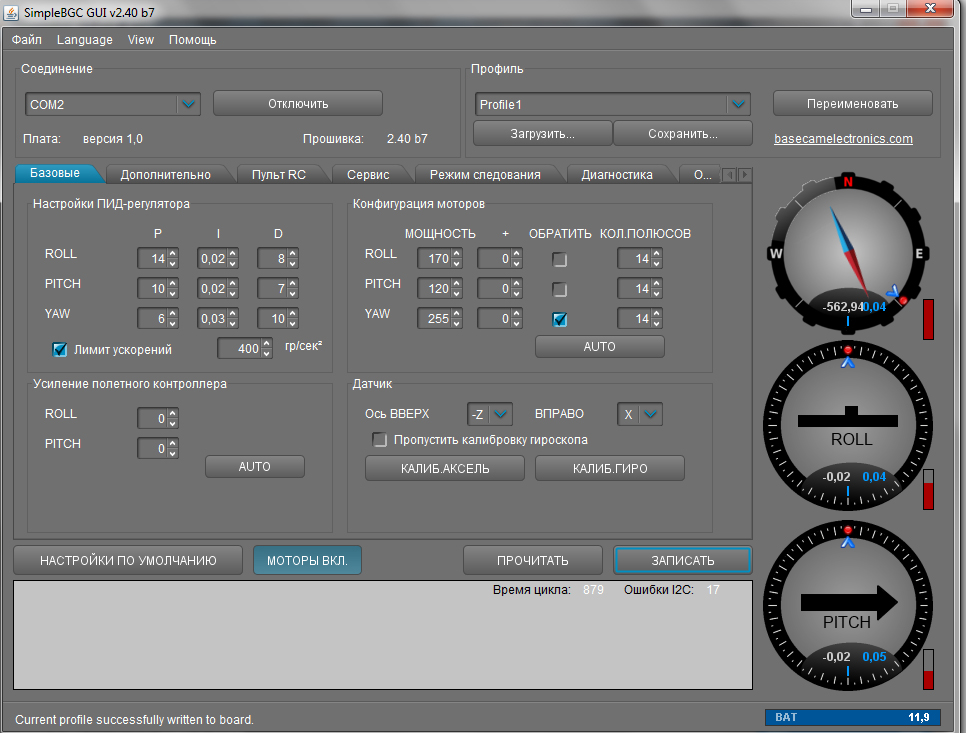
Сообщение отредактировал Konstantin: 24 February 2015 - 09:46 PM
#252
Летчик
Отправлено 24 February 2015 - 09:53 PM
Мои настройки выглядят так. Немного странно, по сравнению с примерами в интернете
#253
Летчик испытатель
Отправлено 24 February 2015 - 10:05 PM
мотор yaw не греется?
Немного греется, но не сильно.
У меня все запитано от регулятора 12В 3А. Он тоже не греется. Думал запитать от отдельного аккума, но уже веса дофига получается.
#254
Опытный летчик АС
Отправлено 24 February 2015 - 10:15 PM
Смотрю тут знающие собрались, может подскажете? У меня подвес Валкеры трех осевой, подвес смотрит чуть в бок (сразу и не поймешь), пробовал подвес повернуть на оси yaw, но там фаска на валу и не дает повернуть, попробовал повернуть резистор на моторе yaw, и не получилось, вернее резистор повернул, но подвес стал смотреть в право, как не скрутил резистор подвес упорно смотрить или чуть влево или в право, сделал вывод что ось становится в определённые положения из за магнитов. Получается есть "шаг" поворота?
#255
Летчик испытатель
Отправлено 24 February 2015 - 10:29 PM
Может, это поможет?
Сообщение отредактировал Konstantin: 24 February 2015 - 10:30 PM
#256
Опытный летчик АС
Отправлено 24 February 2015 - 10:33 PM
Может, это поможет?
Скачаю гляну, через пол часа скажу))))
#257
Опытный летчик АС
Отправлено 24 February 2015 - 11:04 PM
Посмотрел, очень даже интересно, постараюсь завтра/послезавтра проверить, удастся ли поставить идеально прямо подвес.
#258
Летчик испытатель
Отправлено 25 February 2015 - 12:06 AM
Посмотрел, очень даже интересно, постараюсь завтра/послезавтра проверить
Будем надеяться, что поможет.
У меня есть 2 валкеры, но обе не требуют юстировки
#259
Опытный летчик АС
Отправлено 25 February 2015 - 01:10 AM
#260
Летчик испытатель
Отправлено 25 February 2015 - 05:16 PM
Завтра должен прийти более мощный мотор, посмотрим, спасет ли это.
Пришел.
T-Motor GB54-2
Как ни крутил, не получилось прокрутить....Смотрит вперед.
Только рукой можно заставить смотреть в сторону.
Даже мощность уменьшил на 220.
Единственное, не пойму, когда коптер наклоняешь примерно на 45° вперед или назад, подвес начинает нервничать и дергаться.
Что бы это могло значить?
Сообщение отредактировал Konstantin: 25 February 2015 - 05:27 PM







0 пользователей, 0 гостей, 0 анонимных



