Включите режим Smart RTH, только учитывайте, что система определения препятствий не работает при плохой освещённости.
Лучше пускай включена будет, т.к. при плохой погоде будет не работать, зато при хорошей будет включена.
|
|

 #3921
#3921
Летчик со стажем


Отправлено 22 March 2017 - 09:06 PM
Включите режим Smart RTH, только учитывайте, что система определения препятствий не работает при плохой освещённости.
Лучше пускай включена будет, т.к. при плохой погоде будет не работать, зато при хорошей будет включена.
#3922
Летчик со стажем
Отправлено 22 March 2017 - 09:16 PM
RostoVR, у вас прям не текст, а маленькая трагедия) Конечно, на месте автора именно для этого эксперимента, я бы включил для RTH режим ховер, при потере связи коптер бы просто завис на месте, так как сидя за рулем точку Дом менять не удобно да и не нужно, чтобы коптер сел на дорогу. А почему не догонишь то, у него по сравнению с авто скорость то так себе. Можно остановится, выйти из машины и восстановить связь.
RusDrone, спасибо за подсказку! Почему не догонишь? 1. Коптер срезает углы, в отличии от Вашей машины))) Если дорога извилистая, фиг догоните Мавик, а если высота не верная - то пиши пропало.
Пока Вы остановите машину, пока выйдете - коптер улетает то быстро...
И вот в этой теме листов 100 назад было видео, где тоже на Рейнджровере катались с Мавиком — связь потерялась и он рванул на точку взлёта — нифига не догнали его, и вообще еле нашли на дереве.
За подсказку насчёт режима зависания — ещё раз спасибо!
#3923
Летчик со стажем

Отправлено 22 March 2017 - 09:24 PM
Кто-нибудь возвращал Mavic на замену в связи с микро волнами, дрожанием на видео?
#3924
Летчик со стажем
Отправлено 22 March 2017 - 09:28 PM
Если повреждена одна из лопастей, вибрация передается по корпусу на изображение. Где то была проверка на ютубе.
Что то типа этого, от уважаемого creep
http://dji-club.ru/i...topic/7886-faq/
Сообщение отредактировал RinatM: 22 March 2017 - 09:29 PM
#3925
Летчик со стажем
Отправлено 22 March 2017 - 09:37 PM
Прикольно устроен пилот коптера. Каждый-каждый пилот попробует сначала взлететь дома, потом советует другим этого не делать, чтобы убедиться после, что новички снова взлетают дома и снова советуют этого не делать.)))на улице дрон слушается отлично, но в комнате когда делаю разворот на месте на 360 то улетает в сторону и начинает крушить все на своем пути, так что в помещениях разворот на месте делать не советую.
#3926
Начинающий летчик
Отправлено 22 March 2017 - 10:05 PM
IMU калибровать же со снятым фиксатором подвеса, верно?
#3928
Начинающий летчик
Отправлено 22 March 2017 - 10:12 PM
Про включать - понятно, он же подвес тестит при включении. Просто при калибровки IMU по картинкам не понятно, колпак нарисован, да и ставишь Мавик во всякие разные позы), подвес болтается. Подумал вдруг фиксатор ставить надо
#3929
Опытный летчик АС

Отправлено 22 March 2017 - 11:02 PM
MaxP, В родном (DJI) ролике по калибровке IMU подвес под колпаком, но вполне видно, что камера "гуляет", что невозможно с фиксатором.
#3930
Опытный летчик АС
#3931
Начинающий летчик
Отправлено 23 March 2017 - 04:38 AM
Вы на гоупро какой режим используете?
я уже не помню. т.к. от камеры избавился. и купил гп5. посмотрел видео и ещё раз убедился, что гопро хороша только в воде. а для суши я докупил сони X3000. после мавика сильно уж разница видна, даже на гп5.
#3932
Начинающий летчик
Отправлено 23 March 2017 - 06:03 AM
zatey, он сам в атти переходит когда спутников нет, в опти когда он ориентируется на сенсоры.
#3933
Летчик со стажем

Отправлено 23 March 2017 - 08:20 AM
#3934
Летчик со стажем

Отправлено 23 March 2017 - 09:38 AM
я именно с такой проблемой (отвалом фикса GPS) сталкивался однажды, ошибка с первых секунд полета, но я тогда не обратил на нее особого внимания, ну отвалились спутники - сейчас поймает, подумал я)))) И действительно потом Мав поймал и снова перешел в GPS режим. Далее "провалы" были 8 раз)))) Благо дрон был в поле видимости и я его в итоге посадил штатно, ребутнул и все гуд, продолжил дальше летать без каких либо глюков.
У меня к Вам просьба... скинуть лог с хелсидрон на посмотреть. Ну или сами ответьте на вопрос - с какой минуты пошел глюк. У меня сильное подозрение, основанное на опыте трех мавиков + мой, что глюк с фиксом GPS происходит с первых секунд.
#3935
Начинающий летчик
Отправлено 23 March 2017 - 10:15 AM
Все-таки не нашел ответа, какие могут быть причины, что видео фризит?
#3936
Опытный летчик АС
Отправлено 23 March 2017 - 10:37 AM
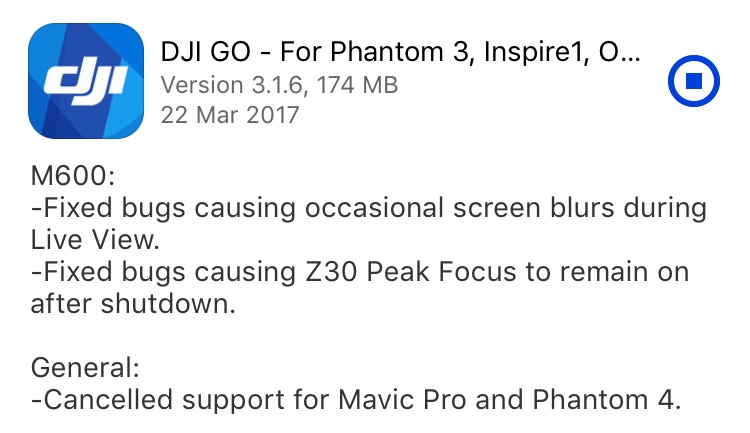
В последней версии DJI GO попрощаемся с поддержкой F4 и MP
 #3937
#3937
Летчик со стажем
Отправлено 23 March 2017 - 11:54 AM
Сообщение отредактировал Shanti: 23 March 2017 - 11:56 AM
#3939
Опытный летчик АС

Отправлено 23 March 2017 - 12:04 PM
Уже иму калибровал в чистом поле и следом компас.
Надеюсь это делали перед полётом, а не сразу после? Для калибровки IMU нужно что бы коптер полностью остыл, на это требуется от 30 минут до 1ого часа.
#3940
Летчик со стажем
Отправлено 23 March 2017 - 12:15 PM
Сообщение отредактировал Shanti: 23 March 2017 - 12:18 PM







Коптеры →
Mavic Air / Air 2 / Air 2S →
Обсуждение (Maviс Air 2)- Свободная.Автор sberkut , 28 Apr 2020 |
|
|
||
Коптеры →
Mavic 2 Pro / Zoom →
Обсуждение (Mavic 2 Pro, Mavic 2 Zoom)Автор Poster1 , 23 Aug 2018 |
|

|
||
Коптеры →
Вопросы - Однодневки →
Пропадает сигнал на Magic pro каждые 3-5 минут полётаАвтор Paveltolcheev , 22 Mar 2018 |
|
|
||
Наш форум →
Болталка →
Мавик и Фантик: что происходит. Куда DJI полетит дальше?Автор Bleeper , 09 Aug 2017 |
|

|
||
Фото и Видео →
Фото и ролики пользователей →
Открытие мотосезона 2017 в Астане. Inspire 1 pro.Автор Artyom , 02 Jun 2017 |
|

|
0 пользователей, 14 гостей, 0 анонимных
