Не имеет никакого значения положение этого тумблера когда дрон висит у тебя под носом и ты собираешься его сажать.
.....
Полагаю, именно в этом должен заключаться опыт...
1) Настройка "возврат на текущей высоте" имеет значение когда начинает отрабатывать RTH как в моём случае.
2) Локация выбрана исходя из целей - снимал осенние деревья вид сверху ))) , запускать вне парка не представлялось возможным, спецом проехался поискал...
3) Никаких установок по принудительному RTH не изменял, всё по умолчанию.
4) Датчики круговые при автопосадке отключаются сами, что ещё отключать? И да, я дилетант, дрон у меня пару месяцев.
5) Бороться за дрон нужно, но когда он висит в метре от вас и в паре метров над землёй и за 0,5 сек улетает в кусты, то отреагировать невозможно )))
6) На пульт не смотрел, но уведомление о RTH воспринял, не стал реагировать потому как считал что дрон уже дома, полагаю здесь тоже можно сделать вывод, что если такой сигнал получаешь, то что-то не так и дрон собирается куда-то где он считает его дом ))) Это надо учесть.
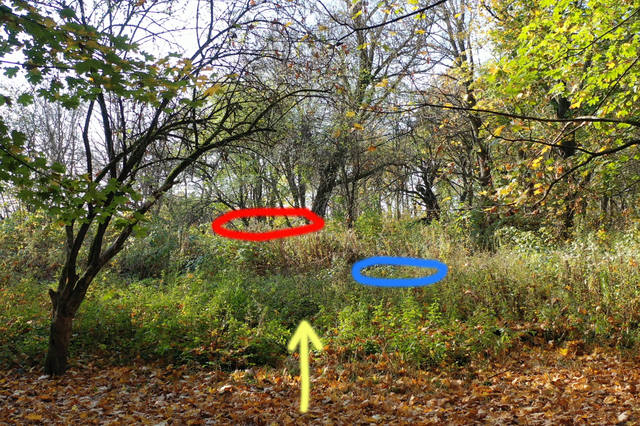
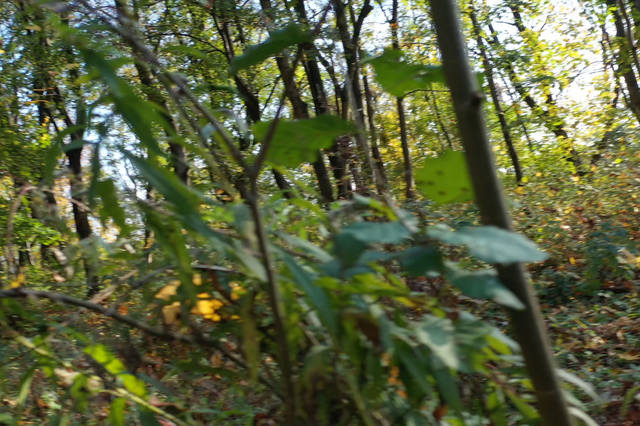
7) Вот для меня это самая большая загадка - почему точка дом оказалась в кустах, под кроной деревьев, куда я даже и подойти не мог...
8) Опыт я получил и вывод сделал, о чём и рассказал.
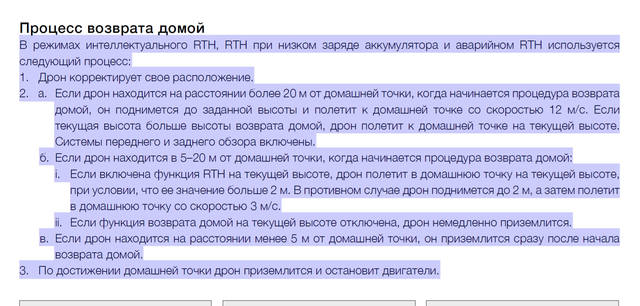
Вот фото места краша, жёлтым откуда я зашёл на поляну, синим - где лежала площадка, красным, куда дрон улетел.
Сообщение отредактировал SergSSA: 25 October 2019 - 01:28 PM




 Вам повезло много больше - у вас винты косили ветки, мои же - встретила открытая железная дверь гаража - брр...
Вам повезло много больше - у вас винты косили ветки, мои же - встретила открытая железная дверь гаража - брр...  А то мне в Вашей тональности послышалась некая раздраженность. Да - скорее всего, послышалась.
А то мне в Вашей тональности послышалась некая раздраженность. Да - скорее всего, послышалась.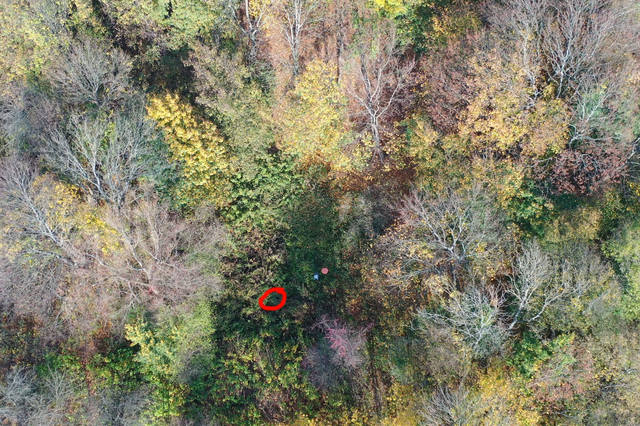


 - А сколько до дома? Если больше 20 метров, то поднимаемся и летим
- А сколько до дома? Если больше 20 метров, то поднимаемся и летим