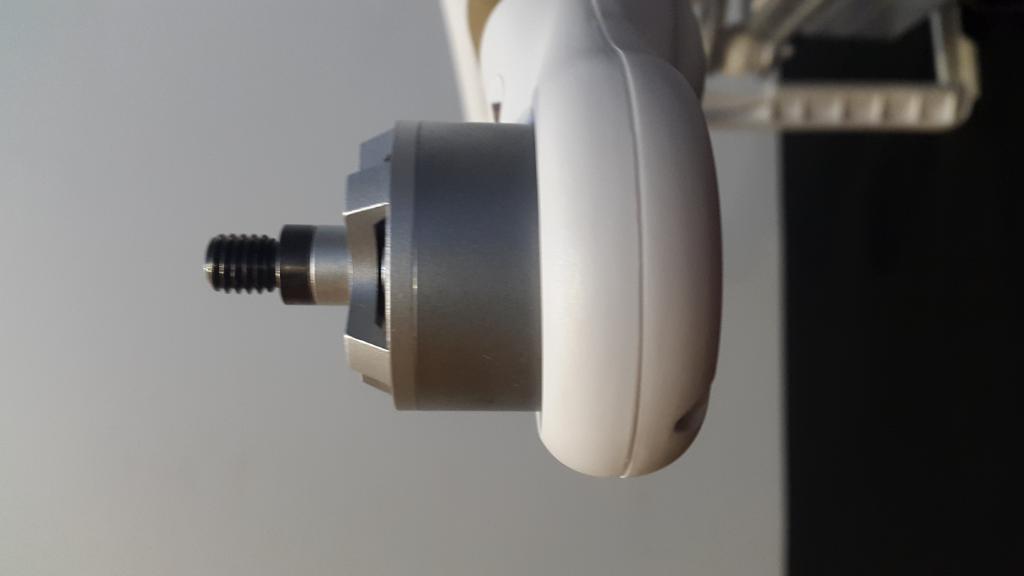
Товарищи, подскажите, заметил, что у меня стоят криво моторы на F3 advanced. Они стоят под углом, а мне кажется что должны быть строго вертикально (см. фото). У кого как, посмотрите пожалуйста.
|
|

 #1
#1
Начинающий летчик

Отправлено 16 October 2016 - 09:35 PM
Товарищи, подскажите, заметил, что у меня стоят криво моторы на F3 advanced. Они стоят под углом, а мне кажется что должны быть строго вертикально (см. фото). У кого как, посмотрите пожалуйста.


 #2
#2
Опытный летчик АС

Отправлено 16 October 2016 - 10:14 PM
kirspb , они у всех фантомов под углом стоят не переживайте, но на фото у вас видна трещина луча в нижнем креплении мотора, а это надо лечить.
#3
Начинающий летчик
Отправлено 16 October 2016 - 10:22 PM
 #4
#4
Опытный летчик АС

Отправлено 16 October 2016 - 10:25 PM
Смотрим тему http://dji-club.ru/i...antom-2-vision/
Никаких "под углом" быть не должно. Не хочу спорить с авторитетными юзерами. Имею имхо!
------
Меняем корпус. В новом корпусе геометрия строгая. Тупая, прямоугольная.
Так-то... я бы купил новый коптер.
------
Извините, но мне жаль людей, которые верят, что в полистироловом тонкостенном корпусе можно долговременно соблюсти геометрию ...
Извините....
Сообщение отредактировал ЮХа: 16 October 2016 - 10:34 PM
#5
Летчик со стажем

Отправлено 16 October 2016 - 10:43 PM
ЮХа , в третьем фантике моторы под углом. Для стабильности, имхо
#6
Опытный летчик АС
Отправлено 16 October 2016 - 10:47 PM
ЮХа , Приношу извинения, что указал "на всех фантомах", на 2-х этот эффект почти не видно, но он тоже есть. Для сравнения привожу быстрые фото своих моторов, Фантом 3 Про, не падал, не перегревался, трещин на корпусе нет.

Сообщение отредактировал olegnsk: 16 October 2016 - 10:51 PM
#7
Опытный летчик АС
Отправлено 16 October 2016 - 10:58 PM
Ок, товарищи.
Я тоже приношу извинения, но еще раз имхо: то что некоторые считают хитрой геометрией , или брак или дефект.
Не вижу я причин искажать соосность четрёхдвигательных девайсов.
По какой причине наклонять? Ведь квадрокоптер симметричен!
Сообщение отредактировал ЮХа: 16 October 2016 - 11:01 PM
#8
Летчик
Отправлено 17 October 2016 - 04:19 AM
По какой причине наклонять? Ведь квадрокоптер симметричен!
Это у производителя надо узнавать, с какой целью и для чего он посчитал нужным применить те или иные технические решения (на 3 фантике они явно стоят не симметрично), так нам только гадать остается, ну или искать кого то кто понимает в впоросе и может пояснить для чего, как вариант, например для лучшей стабильности (или маневренности), как схождение колес у авто, все ИМХО.
#9
Летчик со стажем
Отправлено 17 October 2016 - 02:45 PM
Я тоже приношу извинения, но еще раз имхо: то что некоторые считают хитрой геометрией , или брак или дефект.
Это не брак и не дефект. Об этом уже не раз писали. Но Вы можете оставаться при своем мнении 
"Силовая установка квадракоптера оснащена четырьмя электродвигателями, которые слегка наклонены." Ссылка отсюда https://geektimes.ru...o/blog/259788/

Сообщение отредактировал Altair: 17 October 2016 - 02:57 PM
#10
Опытный летчик АС
Отправлено 17 October 2016 - 07:31 PM
...которые слегка наклонены...
Симметричная конструкция квадрокоптера лично для меня не создаёт предпосылок для "наклонения" двигателей. Но если наклон есть, значит он кому-то нужен.
Реальное объяснение необходимости наклона может дать только производитель. Естественно, если наклон каждого двигателя так же симметричен наклону противоположного, то это попытки производителя скомпенсировать некоторый силовой момент. Нужно это или не нужно - вопрос восемнадцатый.
Рассматривая осевое положение двигателей Inspire 1 ( сбоку) вижу строгую вертикаль. Если спереди (или сзади) наклон есть. И значительный. Но это в стартовом положении. В полётном геометрия иная. И, очевидно, некоторый наклон будет сохранятся.
Итак: если приливы на точках крепления двигателей имеют разную высоту, и эта разновысотность одинакова на всех четырёх лучах с точностью десятой доли мм., то ... снимаю шляпу перед мудростью производителя.
Товарищи! Я жду оппонентов!
Хочется поговорить за "перекосы"
#11
Начинающий летчик

Отправлено 28 October 2016 - 12:08 AM
На Ph 3 Adv все моторы наклонены, вращающиеся по часовой - вправо (если смотреть "к центру коптера" вдоль луча), вращающиеся против часовой стрелки - влево.
#12
Летчик
Отправлено 28 October 2016 - 11:08 AM
Создается ощущение, что обсуждают тему не владельцы фантиков! Три новых фанта эдвансед пользовал: везде есть описанный выше наклон. Везде он реализован производителем посадочной формой в луче. (все три - с новой ревизией движков).
#13
Летчик со стажем

Отправлено 11 January 2017 - 09:51 PM
У меня двигатели тоже наклонены.
Выскажу предположение, что наклоном двигателя достигается рыскание воздушного судна.
Вращение вокруг вертикальной оси, проходящей через центр крепления подвеса и центр датчика GPS (назовём её ЦОС центральная ось судна), будет невозможно, если все винты вращаются строго в горизонтальной плоскости. Вектор тяги каждого двигателя проецируется только на ось аппликат и может менять только только своё значение. Если же двигатели слегка наклонить, то будет возможным разложить вектор на ось аппликат приоритетом и на ось ординат немного, как раз проекция силы тяги винта на горизонтальную ось создаст силу в горизонтальной оси, которая создаст момент вокруг оси ЦОС. То этот момент приведёт к выведению воздушного судна из состояния покоя в локально принятой системе координат, относительно оси ЦОС и квадрокоптер начнёт поворачиваться вокруг оси ЦОС.
Тем, что двигатели "наклонены друг на друга" момент одного двигателя гасит другой спаренный с ним и поворота судна, относительно ЦОС не происходит. Стоит лишь управляющему устройству задать разную скорость спаренным винтам, как результирующий вектор проекции тяги винтов создаст вращающий момент и заставит раскать воздушное судно.
Сейчас схемы начерчу и сюда скину.
Вот схемы задания рысканья воздушному судну в полёте https://yadi.sk/d/sUMvTqhj38UY7Q (сканы на Яндекс.Диске). Это моё предположение. Я нигде не смотрел, сам придумал сейчас. Я изучал механику в институте.
Тангаж задаётся при условиях УСВ1=УСВ2; УСВ3=УСВ4; где УСВ№ - угловая скорость вращения, № двигателя
при этом
если УСВ1<УСВ3 квадрокоптер летит вперёд, относительно своего носа;
если УСВ1>УСВ3 квадрокоптер летит назад.
Крен задаётся условиями УСВ1=УСВ3; УСВ2=УСВ4;
при этом
если УСВ1<УСВ2 квадрокоптер полетит влево, относительно своего носа;
если УСВ1>УСВ2 квадрокоптер полетит вправо.
Здесь указаны № двигателей, как я задал на схемах, про которые писал выше.
Рысканье задаётся при условиях УСВ1=УСВ4; УСВ2=УСВ3;
при этом
если УСВ1<УСВ2 квадрокоптер будет вращаться против часовой стрелки, относительно оси ЦОС, при взгляде сверху;
если УСВ1>УСВ2 квадрокоптер будет вращаться по часовой стрелке.
Контроллер квадрокоптера узнаёт про текущие значения углов тангажа, крена через показания гироскопа. Получается замкнутая система.
А угол рысканья определяется через компас.
Итог: я считаю, что необходим наклон осей двигателей. Иначе рысканье не задать.
#14
Опытный летчик АС
Отправлено 11 January 2017 - 09:58 PM
Вращение вокруг вертикальной оси, проходящей через центр крепления подвеса и центр датчика GPS (назовём её ЦОС центральная ось судна), будет невозможно, если все винты вращаются строго в горизонтальной плоскости.
Ну, тут надо еще подумать. Спасибку поставил !
#15
Летчик со стажем
Отправлено 11 January 2017 - 10:23 PM
вектор тяги от винта строго по оси двигателя и не может быть изменён по направлению аппаратно или на программном уровне? Я полагаю, что это так. Если это так, то чем ещё можно заставить квадрокоптер рыскать (осматривать горизонт, крутиться на месте) если вектора тяги строго вверх и сил нет в горизонтальной плоскости?
Ну, тут надо еще подумать
Я не знаю как задаётся рысканье, я предположил и создал математическую модель. Я могу и ошибаться.
"Далее, рыскание – у нас на коптере два двигателя (на одной оси) вращаются по часовой стрелке, два других — против часовой. Соответственно, чтобы развернуть ЛА против часовой стрелки, нужно увеличить обороты первой пары двигателей и, на аналогичную величину, снизить обороты второй пары. Вобщем, все то же что и раньше, только управляющее воздействие применяем не к одному двигателю а к паре двигателей."
Источник: http://we.easyelectr...y-i-otvety.html
Но здесь не указано двигатели наклонены или нет.
"Управление поворотом (рысканье)
Если использовать одинаковые пропеллеры, вращающиеся в одну сторону — сам аппарат будет закручиваться в горизонтальной плоскости в противоположном направлении. Чтобы устранить этот эффект — используют два «правых» пропеллера и два «левых», и вращают их в разные стороны. Таким образом, они будут взаимно компенсировать рысканье аппарата. Если же нарушить этот баланс — коптер начнёт поворачиваться в какую-то сторону (по закону сохранения момента импульса). То есть, чтобы изменить рысканье коптера — нужно замедлить одну диагональную пару винтов, и ускорить другую пару, в зависимости от требуемого знака рысканья и направлений вращения винтов. К примеру, чтобы повернуть направо — нужно ускорить «левые» винты и замедлить «правые»."
Источник: http://catethysis.ru...sition_control/
Исходя из этого текста, квадрокоптер может поворачиваться относительно ЦОС без наклона двигателей, а через аэродинамический эффект.
С поправкой на эту статью, цитата которой выше, я полагаю, что разработчики DJI наклонили оси двигателей, чтобы усилить аэродинамический эффект приводящий к рысканью механической составляющей.
#16
Летчик со стажем
Отправлено 17 January 2017 - 12:00 PM
сразу видно что никто сам коптер не собирал потому и не знаете для чего нужен выкос моторов)))это делается для стабильности висения квада,особено при всиении близко к земле,таким образом достигается воздушная подушка удерживающая его в одном месте,обычно выкос делается к центру рамы,таким образом чтоб стабильность была по всем осям,но у фантома выкос только в одной оси,также выкос уменьшает производительность,поэтому не все ее применяют.правильно говорят что фантомы убивают творческое начало в моделистах,покупают фантомы и задают кучу элементарных вопросов








Наш форум →
Ремонт коптеров и подвесов DJI (мастерская, запчасти) →
Замена Pitch мотора Phantom 4 AdvАвтор malazess , 03 Aug 2019 |
|

|
||
Наш форум →
Ремонт коптеров и подвесов DJI (мастерская, запчасти) →
Болтает Phantom 3 seАвтор Teen , 06 Dec 2017 |
|

|
||
Коптеры →
Phantom2, Phantom2 Vision, Phantom2 Vision+ →
Электрика - моторы, регуляторы, аккумуляторы (Phantom2)Автор Poster1 , 13 Jan 2014 |
|

|
||
Коптеры →
Phantom1, FC40 →
Электрика - моторы, регуляторы, аккумуляторы (Phantom1,FC40)Автор Poster1 , 20 Nov 2013 |
|

|
0 пользователей, 1 гостей, 0 анонимных
