пытался полетать GS PRO с настройками малость разобрался задал маршрут с настройками в точке запись видео, стоп видео, фото, снова запись виде И так далее на середине маршрута почему-то перестал писать видео фото продолжал делать.

Анонсирована DJI GS pro (Ground Station Pro)
Автор
N00B
, Jan 04 2017 01:59 PM
Сообщений в теме: 160
 #81
#81
Ссылка на это сообщение #81") OFFLINE
OFFLINE
Sen
-
- Пользователи
-

- 23 сообщений
Начинающий летчик
- Город:Кировград
- Коптер:DJI Mavic PRO
#82
OFFLINE
ЮХа
-
- Пользователи
-
- 7166 сообщений
Опытный летчик АС
- Город:Кострома
#84
OFFLINE
ДядяМитя
-

- Пользователи
-
- 189 сообщений
Летчик со стажем
- Город:Киев
- Коптер:Рh4, Mpro
Отправлено 27 March 2017 - 09:05 PM
Sen,если фото делал, значит видео было отключено. Программно невозможно внести действие ФОТО если ранее было включено действие ВИДЕО.
Исходя из этого делаем вывод, раз коптер "продолжал" фотографировать, значит ранее было действие СТОП ВИДЕО. Если бы видео "почему-то" отключилось без запрограммированной команды, то не было бы и фото.
Немного замучено с настройками действий в этой проге, нет общей картинки перед глазами, надо лазить в каждую точку и перепроверять действия.
Просто надо быть внимательнее.
Подобным образом запутался в действии "поворот коптера". Там не от курса пляска, а от Nазимута.
Исходя из этого делаем вывод, раз коптер "продолжал" фотографировать, значит ранее было действие СТОП ВИДЕО. Если бы видео "почему-то" отключилось без запрограммированной команды, то не было бы и фото.
Немного замучено с настройками действий в этой проге, нет общей картинки перед глазами, надо лазить в каждую точку и перепроверять действия.
Просто надо быть внимательнее.
Подобным образом запутался в действии "поворот коптера". Там не от курса пляска, а от Nазимута.
#85
OFFLINE
ЮХа
-
- Пользователи
-
- 7166 сообщений
Опытный летчик АС
- Город:Кострома
#86
OFFLINE
ДядяМитя
-
- Пользователи
-
- 189 сообщений
Летчик со стажем
- Город:Киев
- Коптер:Рh4, Mpro
Отправлено 27 March 2017 - 09:20 PM
С перепадами высот есть вопросы, особенно если в какой то точке маршрута надо опустится пониже.
Гуглу веры нет, проверено. Я один интересный маршрут за холм делал так: вершину холма откалибровал с точки взлёта получил разницу в 45 м. Потом переехал на точку за холмом, там где не будет связи и надо программировать действия, взлетел, откалибровал ту же вершину холма. Получил разницу в 35 м. По сути просто отсканировал высоты по маршруту используя один, два ориентира.
Исходя из этого строил маршрут. Муторно, зато спокойно коптер в автомате без связи с пультом патрулирует территорию на высоте 10-15 м над землёй. И возвращается перелетая холм на безопасной высоте.
Гуглу веры нет, проверено. Я один интересный маршрут за холм делал так: вершину холма откалибровал с точки взлёта получил разницу в 45 м. Потом переехал на точку за холмом, там где не будет связи и надо программировать действия, взлетел, откалибровал ту же вершину холма. Получил разницу в 35 м. По сути просто отсканировал высоты по маршруту используя один, два ориентира.
Исходя из этого строил маршрут. Муторно, зато спокойно коптер в автомате без связи с пультом патрулирует территорию на высоте 10-15 м над землёй. И возвращается перелетая холм на безопасной высоте.
#87
OFFLINE
Sen
-
- Пользователи
-
- 23 сообщений
Начинающий летчик
- Город:Кировград
- Коптер:DJI Mavic PRO
Отправлено 27 March 2017 - 09:41 PM
ЮХа,Спасибо за ошибку я даже внимание не обращал, T9 в постарался 
Добавлено позже (27 Март 2017 - 18:41)
ДядяМитя,да я курсе что во время видео фото не делает програмировал 1 точку все алгоритмы включений, выключений видео, фото, изменение горизонта потом просто вделал копирование на все оставшиеся после проверил в ручную 2-3 сработали как надо а потом только фото хотя в каждой было стоп и старт ладно попробую еще по экспериментировать, пока поступил следующим образом создал маршрут с заданным угол горизонта и точками интереса в ручную запустил видео, после сделал копию и вставил фото и прогнал на 2 круг одно фото

#89
OFFLINE
ЮХа
-
- Пользователи
-
- 7166 сообщений
Опытный летчик АС
- Город:Кострома
Отправлено 28 March 2017 - 02:26 PM
Очевидно, нужен планшет с "симкой". Т. е. с функцией Cellular. Или 2-3-4G. Повторюсь: я взял планшет, вышел во двор и активировал GS Pro. На экране видна точка местоположения планшета. Если сделать несколько шагов, то точка движется строго в том направлении, в котором движется планшет. Точность достаточно высокая. 2-3 метра. Модель А1600. "Симка" на борту. На момент покупки цена 24990 ₽. Без "симки" - 18000. Пацаны-менеджеры мне реально сказали: не экономь! Они угадали.
#90
OFFLINE
atitaev
-
- Пользователи
-
- 59 сообщений
Летчик
- Город:Хабаровск
- Коптер:нету
Отправлено 30 March 2017 - 02:43 AM
насколько я понимаю Mavic и DJI GS несовместимы. Минимум фантик 4 про и инспаер.
#91
OFFLINE
olegnsk
-

- Модераторы
-

- 7702 сообщений
Опытный летчик АС
- Город:Москва, исторически Новосибирск и Камчатка
- Коптер:младшенький Mavic и ещё небольшая эскадрилья
Отправлено 30 March 2017 - 10:54 AM
atitaev, GS pro - совместима со всеми моделями DJI начиная с Ф3 Стандарт, с Мавик тоже, учтите только, что приложение работает исключительно на яблочных устройствах.
#92
OFFLINE
ЮХа
-
- Пользователи
-
- 7166 сообщений
Опытный летчик АС
- Город:Кострома
Отправлено 30 March 2017 - 03:55 PM
насколько я понимаю Mavic и DJI GS несовместимы
Не читаем тему.... Лень. Хотим всё и по первому требованию. В посту № 67 сказано о поддерживаемых коптерах.
Сообщение отредактировал ЮХа: 30 March 2017 - 03:55 PM
#93
OFFLINE
atitaev
-
- Пользователи
-
- 59 сообщений
Летчик
- Город:Хабаровск
- Коптер:нету

#96
OFFLINE
RostoVR
-
- Пользователи
-
- 401 сообщений
Летчик со стажем
- Город:Ростов-на-Дону
- Коптер:DJI Inspire 1 RC x2 | MAVIC PRO | OSMO X3 | OSMO Pocket
Отправлено 25 April 2017 - 07:49 PM
Все правильно. Камеры работают на визуальную картинку а дублирующий их Сонар работает на отражении УЗ. Поглощающие материалы не дают отражения и сонар работает неправильно. Камеры теряются на белом. Поэтому белое и поглощающее это опасно.
Жесть, тут все с MAVIC ноют, что им бы ультразвуковые сенсоры - а на поверку оказывается что все датчики должны быть продублированны двумя типами и камеры и ультразвуковые.
Камеры НЕ видят стекло/зеркала/тонкие и особенно горизонтальные объекты, а ультразвуковые датчики не видят мягкие поверхности из тканей, ковров, резины, снега и других звукопоглощающих поверхностей, которые легко распознаются тупыми камерами...
Добавлено позже (25 Апрель 2017 - 19:49)
С перепадами высот есть вопросы, особенно если в какой то точке маршрута надо опустится пониже. Гуглу веры нет, проверено. Я один интересный маршрут за холм делал так: вершину холма откалибровал с точки взлёта получил разницу в 45 м. Потом переехал на точку за холмом, там где не будет связи и надо программировать действия, взлетел, откалибровал ту же вершину холма. Получил разницу в 35 м. По сути просто отсканировал высоты по маршруту используя один, два ориентира. Исходя из этого строил маршрут. Муторно, зато спокойно коптер в автомате без связи с пультом патрулирует территорию на высоте 10-15 м над землёй. И возвращается перелетая холм на безопасной высоте.
Вот и меня вопрос высоты волнует (DJI Inspire 1).
Как правильно выбрать высоту возврата домой (если в DJI GO и если в DJI GS)?
Вопрос в чём?
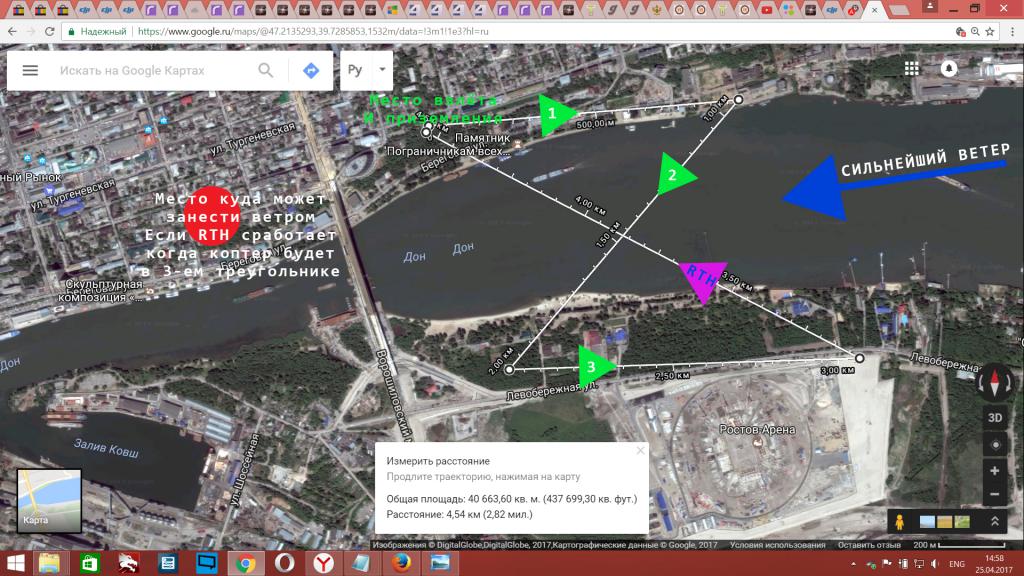
В том что площадка откуда взлетать находится на большой высоте смотрим панораму: https://goo.gl/maps/MiemMVom3wJ2
Летим к стадиону, возврат домой в районе стадиона или выше по течению. Откуда он будет мерять высоту? Прибавлять заданные 50м к уровню с которого взлетал, или к уровню над которым он находится в момент срабатывания RTH?
И да, я боюсь, чтобы из-за ветра его при возврате будет сносить вправо по течению и чтобы в случае если он таки залетит за это стеклянное здание (что видно где мост заканчивается) и из-за потери прямой видимости оборвётся сигнал и сработает RTH (если до этого я летел в ручную), то не хотелось бы протаранить стеклянное здание.
А с другой стороны сильно большую высоту тоже врубать боюсь, т.к. с одной стороны зверский ветер над Доном в любое время года, да ещё и самолёты очень низко летят над Доном в этом месте на посадку.
Жду совета, как правильно рассчитать высоту возврата домой при взлёте с высокого "холма".
Сообщение отредактировал RostoVR: 25 April 2017 - 07:50 PM
#97
OFFLINE
ДядяМитя
-
- Пользователи
-
- 189 сообщений
Летчик со стажем
- Город:Киев
- Коптер:Рh4, Mpro
Отправлено 25 April 2017 - 11:40 PM
RostoVR, rth всегда считается от точки взлёта. Даже если Дрон находится на -20 м он все равно поднимется до высоты RTH (например 100м) то есть увеличит свою высоту на 120 м.
#98
OFFLINE
RostoVR
-
- Пользователи
-
- 401 сообщений
Летчик со стажем
- Город:Ростов-на-Дону
- Коптер:DJI Inspire 1 RC x2 | MAVIC PRO | OSMO X3 | OSMO Pocket
Отправлено 26 April 2017 - 08:44 AM
RostoVR, rth всегда считается от точки взлёта. Даже если Дрон находится на -20 м он все равно поднимется до высоты RTH (например 100м) то есть увеличит свою высоту на 120 м.
Т.е. мои правильные действия таковы:
взлетаем со смотровой площадки сразу вверх и меряем высоту стеклянного здания, прибавляем запас +25м на погрешность GPS при определении высоты и забиваем это значение для высоты возврата домой (а высоту возврата домой можно менять прямо в процессе полёта, или лучше посадить коптер исправить и потом взлетать с новой высотой?)
#99
OFFLINE
Alihancho
-

- Пользователи
-
- 154 сообщений
Летчик со стажем
- Город:Москва
- Коптер:Теперь это лучше не писать
Отправлено 26 April 2017 - 02:10 PM
ДядяМитя
всегда считается от точки взлёта
Все-таки возможны варианты. Можно начать полет в обычном режиме (коптер автоматически запишет Home Point на высоте взлета), потом отлететь/опуститься или подняться до нужной высоты и перезаписать Home Point. И после этого начинать миссию. Тогда он будет возвращаться на высоте рассчитываемой не от точки взлета, а от новой, перезаписанной.
Я, например, для перестраховки, иногда делаю так: когда вылетаю из окна дома (20-этажка, 5 этаж), вручную опускаюсь вниз почти до земли и там перезаписываю Home Point, а потом уже включаю миссию. Это делается для того, чтобы он в случае вынужденного возвращения домой не пёрся автоматом ко мне в окно (читай - в стену дома), а сел на газоне рядом с домом. Но вообще, я его сажаю (ловлю) из окна вручную, в руку, естественно.
Сообщение отредактировал Alihancho: 26 April 2017 - 02:11 PM
#100
OFFLINE
RostoVR
-
- Пользователи
-
- 401 сообщений
Летчик со стажем
- Город:Ростов-на-Дону
- Коптер:DJI Inspire 1 RC x2 | MAVIC PRO | OSMO X3 | OSMO Pocket
Отправлено 28 April 2017 - 03:39 PM
Alihancho, Вы Inspire 1 из окна умудряетесь запускать? А простите как? С руки? Ведь в проём окна он не пролетит же!
И вообще в теме MAVIC это запретная тема запуск из окна - всегда заканчивается крешем:
И да, самое главное КАК потом Вы обратно Inspire 1 приземляете?








Количество пользователей, читающих эту тему: 1
0 пользователей, 1 гостей, 0 анонимных
