Принцип того, как квадрокоптер может летать, проиллюстрирован на вот этой картинке:
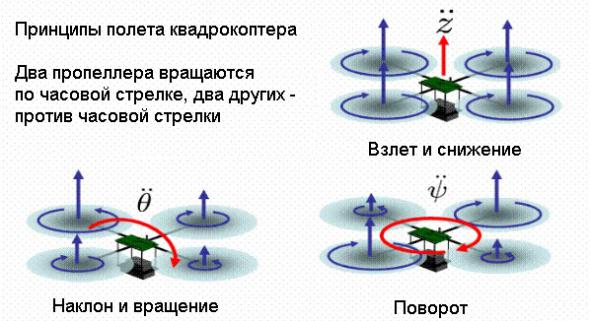
Получается три варианта работы пропеллеров:
* они вращаются все с одинаковой угловой скоростью — это будет управление высотой полета. Чем быстрее вращаются, тем аппарат взлетает выше.
* два мотора, находящихся на одной радиальной линии, вращаются быстрее, чем другие два мотора. В этом случае квадрик будет делать поворот — в зависимости от того, какие два мотора вращаются быстрее других — поворот влево или вправо.
* один из моторов вращается быстрее остальных. Это приведет к наклону коптера вперед (тангаж) и в итоге к полету в горизонтальном направлении по курсу.
Ключевой проблемой БПЛА, а особенно электроБПЛА, является ограниченная дальность и время работы без подзарядки, связанные с быстрым исчерпанием батарей. И даже если роботу не нужно постоянно патрулировать, а, напротив, требуется барражировать лишь периодически или в случае какого-то конкретного повода, остальное время он всё равно тратит топливо и моторесурс.
http://www.youtube.c...h?v=KbtkpYIbuCw
Именно поэтому инженеры Араш Калантари (Arash Kalantari) и Мэтт Спенко (Matthew Spenko) из Иллинойсского технологического института (США) пошли другим путём. Квадрокоптер, естественно, остаётся неподвижным, несмотря на то что его колесо-клетка катится. Если откажут моторы, снижение произойдёт с не смертельной для дрона скоростью. (Иллюстрация ITI.)
Они создали специальное колесо из поликарбоната с элементами из углепластика, внутри которого закрепили квадрокоптер. Дрон в целом получил название HyTAQ. Чтобы не утяжелять конструкцию, колесо, внутри которого находится устройство, крутится теми же электромоторами, что вращают винты. При движении по земле агрегат испытывает только сопротивление качению и не расходует энергию на генерацию подъёмной силы. Если нужно, БПЛА войдёт в режим «на страже», отслеживая происходящее сенсорами и взлетая лишь при необходимости.
Разумеется, благодаря этому среднее время работы между подзарядками выросло в несколько раз. Ну а если при передвижении по земле — почти бесшумном, кстати — ему потребуется преодолеть овраг, бревно или вертикальную стену, он просто перелетит препятствие:
В цифрах дальность квадрокоптера при перемещении в основном в наземном режиме (полёт только для преодоления препятствий) выросла четырёхкратно, а время автономной работы — в шесть раз (при передвижении с остановками).
Определённо, столь малый квадрокоптер, способный катиться, будет полезен на поле боя: в условиях городских схваток, особенно ночью, крошечных роботов трудно обнаружить, а сами они могут разведать как канализацию, так и чердаки высоток. Да чего там: такой подвижный и экономичный бот, которому ничто не угрожает, даже если он внезапно упадёт из-за неисправности, и Curiosity бы пригодился!
Источник Phys.Org.

В этой теме нет ответов
 #1
#1
 OFFLINE
OFFLINE
Poster1
-
- Администраторы
-

- 3740 сообщений
Вездесущ
- Город:Москва
Отправлено 21 February 2014 - 10:56 AM








Темы с аналогичным тегами новости
Наш форум →
Новости о коптерах →
DJI Smart Controller - Новый пульт от DJIАвтор Poster1 , 08 Jan 2019 |
|

|
||
Наш форум →
Новости о коптерах →
DJI анонсировали Zenmuse XT2 - FLIRАвтор Poster1 , 29 Mar 2018 |
|

|
||
Наш форум →
Новости о коптерах →
Новый коптер от DJI - свежие утечки. Ожидаем!Автор Poster1 , 25 Mar 2018 |
|

|
||
Наш форум →
Новости о коптерах →
DJI и Intel участвуют в стартапе Ryze с микродроном TelloАвтор Poster1 , 08 Jan 2018 |
|

|
||
Наш форум →
Новости о коптерах →
Новый индустриальный коптер от DJI - DJI Wind 4Автор Poster1 , 05 Dec 2017 |
|

|
Количество пользователей, читающих эту тему: 0
0 пользователей, 0 гостей, 0 анонимных
