



Ну не совсем так, проводочков много
Это управление наклоном камеры со смарфона двухпроводное.
У меня коптер открыт, если, что нужно сфоткаю. Маяк прикручиваю к GPS.
Да, если не трудно, сфоткай.
Как я понял, межмодульное взаимодействие в фантике организовано через CAN bus, а вот внутримодульное - как придётся, в том числе и по UART. Например:
1) WiFi module uses UART protocol
2) you can sniff it at CAM1 and CAM2 pins using an oscilloscope / UART-USB converter
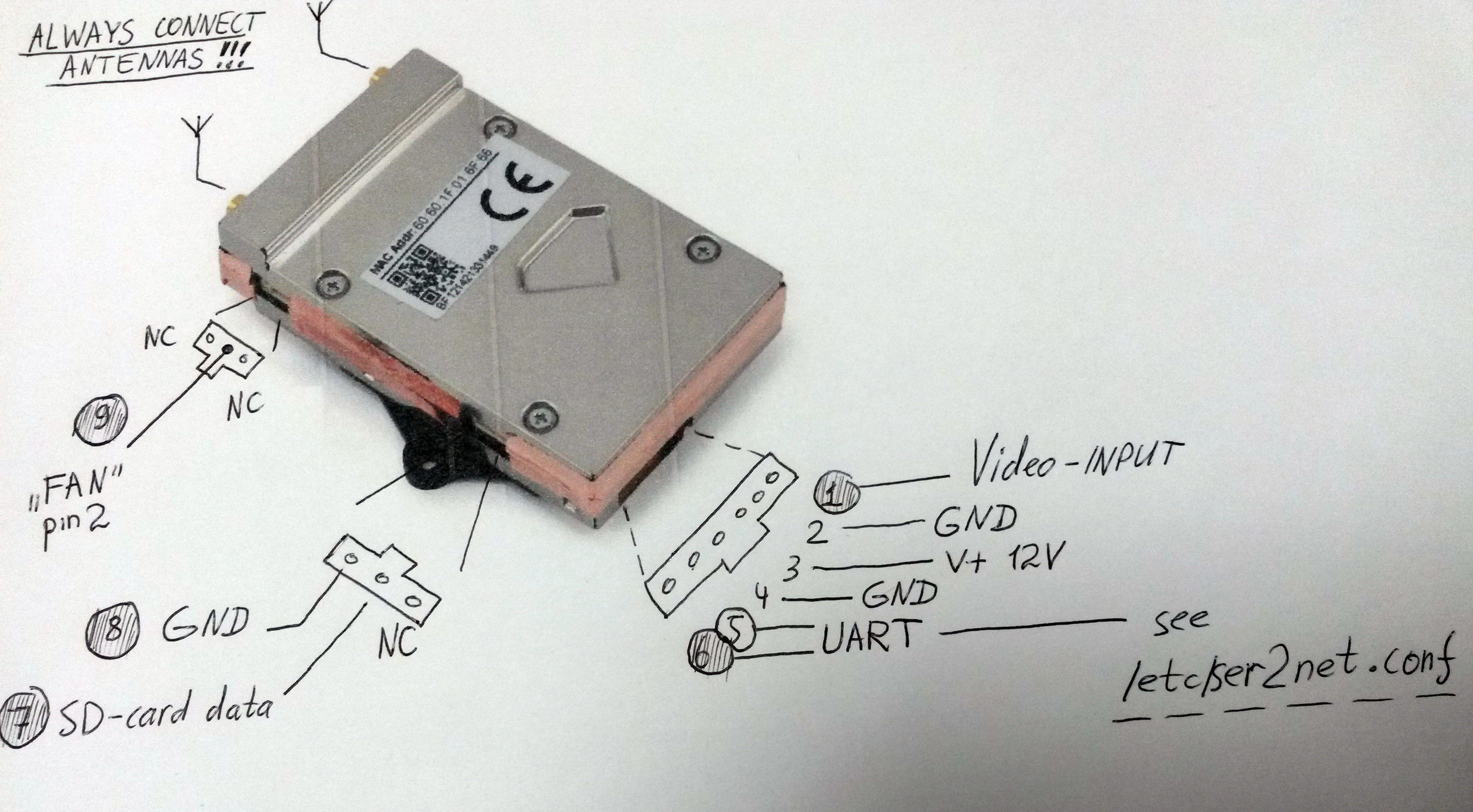
3) the Wifi module's UART is accessible at pin6,pin7 of JST 1.25mm connector
4) UART data is generated by ser2net. See /etc/ser2net.conf for enabling saving this commands to a debug file
5) WiFi module does not generate commands on its own, it just passes commands from an DJIVisionApp to a bird's internals
Т.е. при наличии прямых рук можно подключать WiFi модуль (или подвес) к компу через переходник UART-USB и управляющими сигналами контролировать его работоспособность.
Не надо ничего "тыкать" осциллографом! Просто нужно соединить всё правильно. А шина там одна. Двухпроводная. И, очевидно, двунаправленная. Так что не удасться определить в какой момент кто является "мастером", а кто "славой"
Реально, при разборке нужно было зарисовывать монтаж. Сегодня это делается проще - мобЫлки все умеют "фотать". Это не во времена моего детства, когда даже плёночный фотоаппарат был не у каждого...
Да, согласен. Ступил в этот момент. Понадеялся на собственную память. Как оказалось зря  .
.
 надежности, лишние разъемы и провода, точно не добавили!
надежности, лишние разъемы и провода, точно не добавили! 




 , а то так и будем гадать на кофейные гущи
, а то так и будем гадать на кофейные гущи 








