Если записать точку "дом" прямо на центре обьекта отлететь метров на 30, стать камерой к обьекту, включить хоум лок, зажать правый стик вправо или влево то коптер будет летать кругами мордой к обьекту. От величины отклонения стика будет зависить скорость облета. Как то так.

Что нужно для плавного облета?
Автор
artviz
, Jan 18 2015 01:16 AM
Сообщений в теме: 30
 #21
#21
 OFFLINE
OFFLINE
AlexThunder
-

- Пользователи
-

- 354 сообщений
Летчик со стажем
- Город:Kharkov
#22
OFFLINE
doktor1979
-
- Пользователи
-
- 184 сообщений
Летчик со стажем
- Город:Нерезиновск
Отправлено 21 April 2015 - 04:30 PM
AlexThunder, А с чего он кругами будет летать? Он просто вбок пойдет и все.
#23
OFFLINE
AlexThunder
-
- Пользователи
-
- 354 сообщений
Летчик со стажем
- Город:Kharkov
Отправлено 21 April 2015 - 07:07 PM
AlexThunder, А с чего он кругами будет летать? Он просто вбок пойдет и все.
Нет  Попробуйте ...в бок он пойдет при курс локе, а при хоум локе кругами. Будет двигаться боком вокруг точки дом. На одинаковом удалении как кордовая модель.
Попробуйте ...в бок он пойдет при курс локе, а при хоум локе кругами. Будет двигаться боком вокруг точки дом. На одинаковом удалении как кордовая модель.
#24
OFFLINE
ЮХа
-
- Пользователи
-
- 7166 сообщений
Опытный летчик АС
- Город:Кострома
#25
OFFLINE
Игорек
-

- Пользователи
-
- 104 сообщений
Летчик со стажем
- Город:Москва
Отправлено 25 October 2015 - 12:20 AM
интересно, надо замутить, только на fc-40 получиться?
Добавлено позже:
походу все вымерли.
можно форум от пыли чистить.
или просто в архив как аську отправить. 


#26
OFFLINE
olegnsk
-

- Модераторы
-

- 7702 сообщений
Опытный летчик АС
- Город:Москва, исторически Новосибирск и Камчатка
- Коптер:младшенький Mavic и ещё небольшая эскадрилья
Отправлено 25 October 2015 - 12:31 AM
Слишком много смайликов. Что вы имеете в виду, если сильно грубо, то лучше напишите в личку, дабы не нарушать правил.можно форум от пыли чистить.
Некоторые темы затухают сами собой, т.к. обсуждение переключается на более актуальные сейчас. Эта тема "плавного облёта" уже давно разветвилась, согласно новым функциям для Ф3 и И1 и + физическим решениям для постоянного удержания стиков в пульте.
Сообщение отредактировал olegnsk: 25 October 2015 - 12:37 AM
#27
OFFLINE
eleksir
-
- Пользователи
-
- 2412 сообщений
Жжжжужиммм
- Город:.
Отправлено 27 October 2015 - 10:05 AM
нет, за это не банят, хоть утоните в них)уже банят что много смайликов?
#28
OFFLINE
ikar
-

- Пользователи
-
- 189 сообщений
Летчик со стажем
- Город:Moscow
- Коптер:Phantom 1, Phantom 4, Mavic Pro
Отправлено 17 July 2016 - 03:43 PM
Какие приемы, функции или программы вы используете для того, чтобы при съемке, например, панорамы города, картинка не дергалась при управлении коптером? Существует ли методика, что то типа "следящего фокуса" как в фотоаппаратах, чтобы удерживать объект съемки в центре кадра, но при этом, чтобы коптер управлялся произвольно с пульта, например, как в режиме хоум лок или курс шок? Хотелось бы, чтобы он сам плавненько подруливал, держа выбранный объект. За последнее время много всего нового программного появилось, может кто ткнет пальцем, на что обратить внимание.
Добавлено позже:
Хочется, пролетая мимо какого объекта сфокусировать на нем внимание и при этом продолжать лететь вперед.
Добавлено позже:
Сам вроде нашел ответ на свой же вопрос 
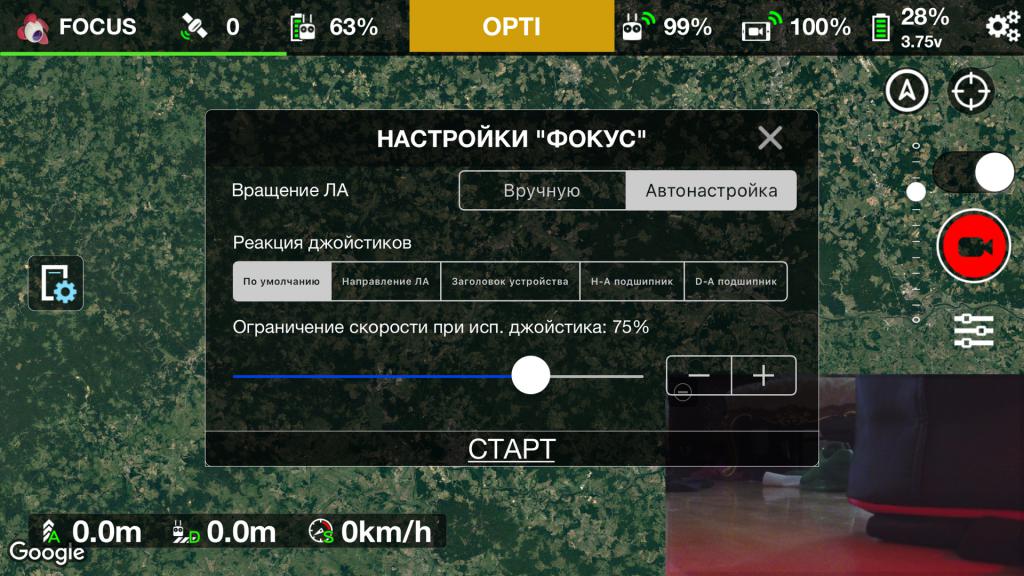
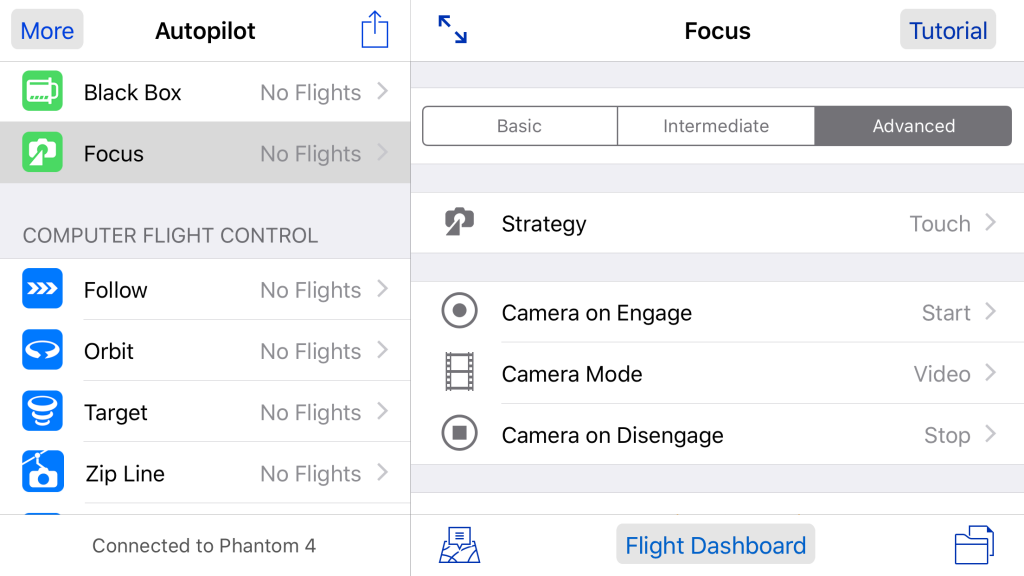
Это режим называется "FOCUS mode".
В DJI GO его нет. Он есть в Личи и в Autopilot
Сообщение отредактировал ikar: 17 July 2016 - 02:58 PM
#29
OFFLINE
SkyGo
-

- Пользователи
-
- 172 сообщений
Летчик со стажем
- Город:Москва
- Коптер:Fantom 3, до этого Inspire 1
Отправлено 17 July 2016 - 09:31 PM
И стоило поднимать вопрос?
Сообщение отредактировал bakhtov: 17 July 2016 - 09:35 PM
#30
OFFLINE
ikar
-
- Пользователи
-
- 189 сообщений
Летчик со стажем
- Город:Moscow
- Коптер:Phantom 1, Phantom 4, Mavic Pro
Отправлено 18 July 2016 - 09:15 AM
bakhtov,
Ну конечно стоило. Настройки этих режимов, что в одной, что в другой программе достаточно сложные. Подробных мануалов на русском нет. Хотелось сэкономить время и спросить на форуме у тех, кто уже прошел этот путь и готов поделиться своим опытом. А так, приходится все изучать самостоятельно, опытным путем.
Ну конечно стоило. Настройки этих режимов, что в одной, что в другой программе достаточно сложные. Подробных мануалов на русском нет. Хотелось сэкономить время и спросить на форуме у тех, кто уже прошел этот путь и готов поделиться своим опытом. А так, приходится все изучать самостоятельно, опытным путем.
Прикрепленные изображения
#31
OFFLINE
Somni
-

- Пользователи
-
- 202 сообщений
Летчик со стажем
- Город:Нижний Тагил
- Коптер:DJI P3A
Отправлено 09 March 2017 - 12:43 PM
Для плавного облёта лучше использовать программные методы, чем ручные: не нужно тренировок на ловкость, экономия нервов и т. д.
В Litchi и AutoPilot в разделе полёт по точкам предусмотрено скругление траектории в опорных точках (линейная аппроксимация + скруггление угов в опорных точках -> интерполяция -> отправка команд коптеру). Скругление выполняется путём нахождения биссектрисы угла меджду соседними отрезками траектории (то есть в опорной точке). Затем к одному из отрезков, которому принадлежит рассматриваемая опорная точка, строится нормаль (перпендикулярная линия). Она строится так, чтобы длина нормали от отрезка до биссектрисы = заданному радиусу скругления. На пересечении нормали и биссектрисы назначается центр кривизны скругления и строится дуга. Вот как это выглядит графически https://yadi.sk/d/I1oVEhtw3FLNJv
Если этого недостаточно, то есть не достаточно плавно (мягко), то в AutoPilot вместо скругления можно выбрать Кривая Безье (она по умолчанию стоит). Кривая Безье предполагает глобальную аппроксимацию полиномом (степень равна числу опорных точек всей траектории) координат опорных точек в функцию (функция очень "мягкая" без острых углов). Затем функция интерполируется (представляется в виде таблицы точек в каждое мгновение времени) и отправляется коптеру в режиме реального времени в виде оперативных команд, содержащих координаты последующих точек.
Это всё происходит автоматически, Вам только нужно задать точки, которые нужно облететь и указать точку, куда смотреть камере на том или ином участке пути.
По тому же адресу https://yadi.sk/d/I1oVEhtw3FLNJv я разместил сравнение использование метода скругления и Кривой Безье.
Сообщение отредактировал SomniPhobia: 09 March 2017 - 12:53 PM








Количество пользователей, читающих эту тему: 0
0 пользователей, 0 гостей, 0 анонимных
