Первый полет Naza M и Ground Station
Ну вот и вырвался полетать. Все спонтанно получилось, катался по делам, небо открылось и я быстро смотался за оборудованием, быстро все включил и полетел… Первые впечатления — летает шикарно, мне понравилось.
Прошу прощения за качество видео.
http://www.youtube.c...h?v=uvWGMiK4ZuI
После загрузки программы полета и нажатия на кнопку GO коптер взрыкивает моторами, и легко взлетает. На секунду зависает над Home на высоте примерно семи метров, и с разворотом на первую точку начинает набирать высоту. По точкам летит очень уверенно и достаточно точно, отклонения от курса в основном после поворота и они небольшие, порядка метра в сторону. Высоту держит очень точно, судя по «приборам» колебания удерживались в рамках 50 см вверх и вниз. Из трех вариантов прохода точки, опробовал два — «Стоп с поворотом» и «адаптивный поворот». В ролике показан полет по маршруту из 6-ти точек расположенных по кругу с «адаптивным поворотом», и поэтому все время полет коптера похож на ровный круг.
Был так же опробован полет по области в режиме «сканирования» с режимом прохождения точек "Стоп с поворотом". В каждой точке коптер останавливался на заданные 2 секунды, разворачивался на следующую точку, ждал 2 секунды и летел дальше. Этот режим шикарен для поиска пропавших моделей, вся заданная область проходится змейкой и нет лишнего метания и не захваченных областей. В любой момент миссии можно нажать кнопку "Pause" и платформа зависает, можно изменить план полета, заново его перезагрузив и нажать кнопку "Continue" — коптер продолжит полет по маршруту.
Передатчик лежит рядом, если его выключить Ground Station начинает сигналить красными буквами что потеряна связь с передатчиком. Работа передатчика на одной частоте с модемами, никак не отражается на их взаимодействии — они друг другу не мешают. Для частоты в 2.4 ГГц это не удивительно, но хотелось проверить. Для автоматического полета необходимо чтобы переключатель Режимов полета находился в положении GPS, при этом стик газа очень рекомендую держать в положении 50%. В любой момент можно прервать миссию переключив Режим полета в ATT и управление через модем отключится, пилот может управлять коптером самостоятельно. Вот тут положение стика на 50% позволяет коптеру зависнуть. При этом, обратное переключение в Режим GPS перехват управления компьютером не происходит — Вы управляете коптером. Ground Station в этом режиме работает как Супер ОСД — отображается вся полетная информация, напряжение аккумулятора, положение, координаты, высота и т.д.. Если Вам надоело летать, можно нажать на кнопку Go Home, при этом появляется служебное окошко, почему то в левом нижнем углу экрана, в котором отображены координаты
Точки взлета, остается подтвердить свое намерение и коптер резво полетит домой. Приземление происходит очень медленно, по приборам скорость снижения составляет около 0.5 м/с, коптер как будто постоянно проверяет наличие земли под шасси. Тут конечно можно посетовать на недоработку — отсюда же взлетали и высота этой точки относительно «уровня моря» известна, почему не опускаться быстро, а за 5 метров до земли включать уже осторожный режим приземления. Надеюсь разработчики введут такой режим. Плюс такого метода приземления в том что, если координаты Точки посадки изменились относительно исходных, то посадка будет мягкой. Ведь новая точка посадки может быть как выше, так и ниже Точки взлета. После посадки моторы работаю еще буквально секунду — полторы и сами выключаются.
К сожалению времени было мало и не все режимы и все плюшки удалось попробовать. Но первые автоматические полеты мне лично понравились, возникло ощущение присутствия маленького китайского пилота в коробочке модема. Следующие полеты впереди, не переключайтесь!
Источник: http://flydrones.ru/...ground-station/

Обзоры - сравнения, тесты, видео
-
 Тема закрыта
Тема закрыта
 #1
#1
 OFFLINE
OFFLINE
-
- Администраторы
-

- 271 сообщений
Админ
Отправлено 18 December 2013 - 08:04 PM
#2
OFFLINE

Отправлено 25 December 2013 - 10:11 AM
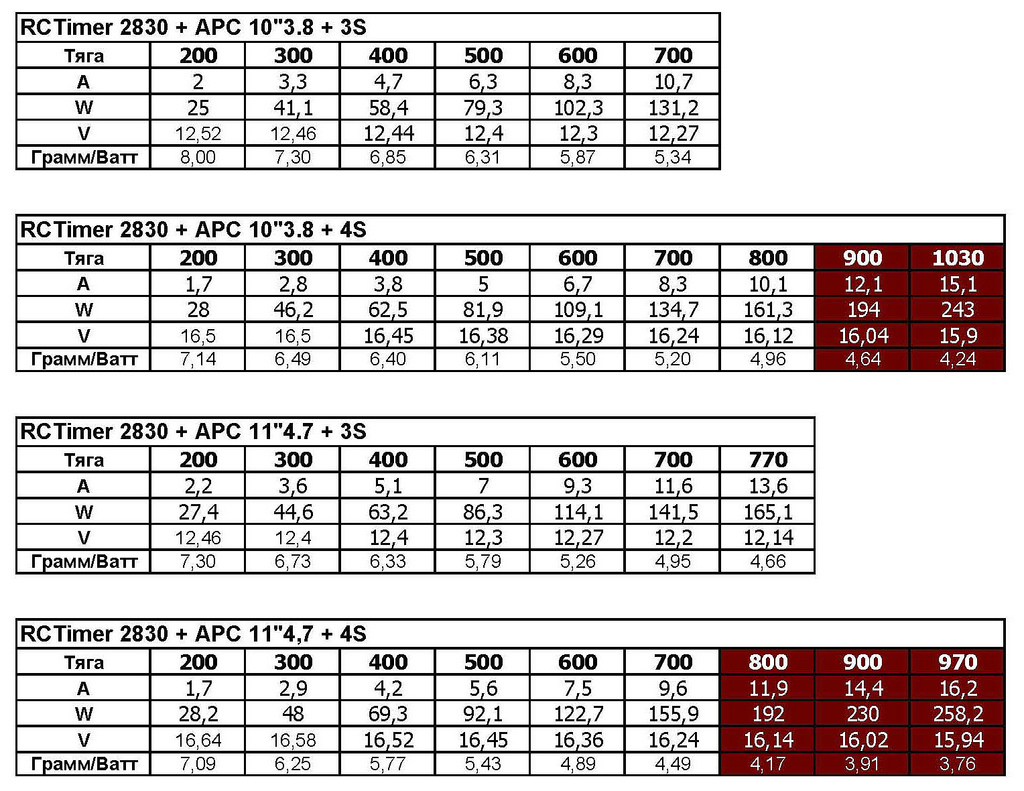
На этот раз интересный моторчик от RC Timer 2830/14.

Приведу данные производителя:
Model: 2830-14
Motor size: Ф28*30mm
Shaft size: Ф3.17*45mm
Weight: 52g
KV(rpm/v): 750
Max Power: 185W
Battery: 2-4Li-Po
Prop: 12×6/9×6
Ri(M Ω): 0.192
ESC: 30A
Могу сразу сказать что с мощностью регулятора ребята погорячились, при проведении теста ток не превысил 16А. И то, это при очень большой перегрузке — почти 260 Ватт при номинальной мощности 185 Ватт. Так что смело можно эксплуатировать его с 18А регулятором, с запасом. На рекомендуемые пропеллеры не смотрим, потому что они для самолетного применения. Комплектная цанга неплоха, но иногда, при наборе оборотов винт вместе с цангой отделялся от мотора и красиво взлетал вверх на полметра. Винтам летать отдельно от коптера как то не комильфо…

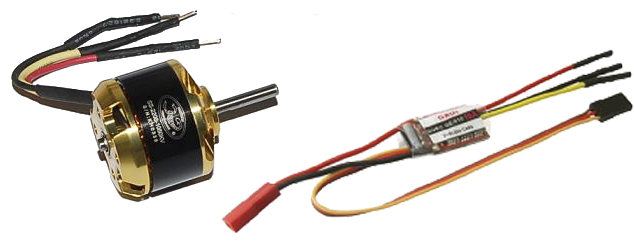
Посему, как только появилось нормальное крепление винта — оно было установлено. Моторчики приобрели «взрослый вид» и перестали быть гадкими утятами. При установке нового крепления, штатная ось была отрезана почти заподлицо с колоколом мотора.
Поскольку производитель не устанавливает на мотор какие либо разъемы, для тестов на квадрокоптере были установлены мелкие удобные «бананы» 2 мм. На снимке выше тестируемый мотор слева. Справа его более мощный брат BC3536 сразу поставляющийся с таким креплением винта. Его тест мы тоже проведем, но позже.
Испытания проводились с двумя аккумуляторами: 4000 mAh 3S и 5800 mAh 4S.
Винты решено было взять из доступных пар фирмы АРС, они себя зарекомендовали хорошо — 10″х3.8 и 11″х4.7.
Итак, таблицы в которых мы традиционно отображаем немаловажные параметры моторов: потребляемый ток в амперах, напряжение в вольтах, вырабатываемую мощность в ваттах и соотношение тяги к мощности. Последнее соотношение все коптероведы желают иметь поменьше.
В темно красной зоне — параметры полученные при перегрузке мотора. После такого измывательства мотор проявил своё недовольство запахом разогретой смазки из подшипников и сильным нагревом.
Выводы, под что можно использовать такие моторчики — делайте сами
Источник: http://flydrones.ru/...-2830-14-750kv/
#3
OFFLINE
Отправлено 25 December 2013 - 10:21 AM
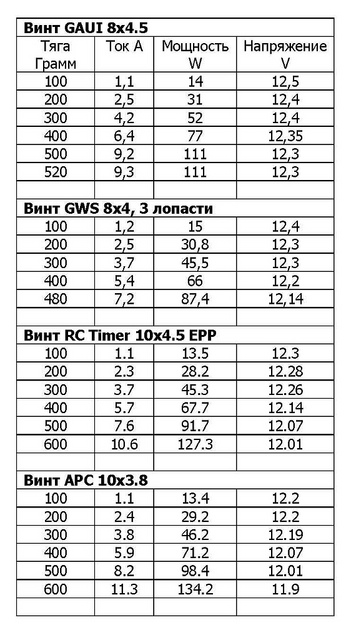
Хочу поделиться тестом моторов от «народного коптера» GAUI 330S, в просторечии называемой ласковым прозвищем «Гайка». В тестах использовались «родные», поставляемые в комплекте регуляторы 10А. Управление регуляторами осуществлялось сервотестером.
Технические характеристики:
Оборотов/вольт: 1050kv
Сопротивление обмотки: 0.19Ом
Максимальная рабочая сила тока: 12А
Максимальная мощность: 400Вт
Вес: 41гр
Внешний диаметр корпуса: 27.9мм
Длина корпуса: 26мм
Диаметр вала: 2.98мм
Тест проводился с аккумулятором 4000 mAh 3 S.
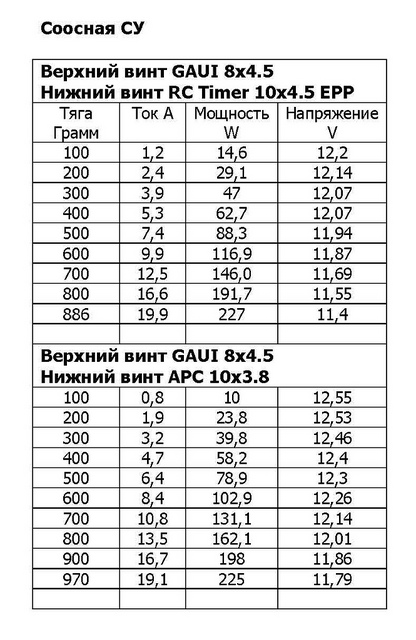
Далее был проведен интересный тест с соосным расположением моторов.
В будущем нас ждут тесты других моторов с разными винтами.
Оставайтесь с нами
Источник: http://flydrones.ru/...-motorov-gm410/
#4
OFFLINE
Отправлено 01 February 2014 - 09:30 PM
Самый маленький квадрокоптер (видео)


На данный момент существует множество квадрокоптеров различных размеров и конфигураций, но большинство из них используется для монтажа камер и съёмки видео с недоступных для человека ракурсов. Современные технологии стремятся к уменьшению любых механизмов, разумеется затронули они и авиамоделирование. Estes Proto X - самый маленький квадрокоптер, который легко помещается на ладони вместе с контроллером. Благодаря компактности и небольшому весу, устройству не требуется мощный мотор, поэтому и цена его соответствующая - всего $40, а каждая зарядка аккумулятора обеспечивает около 10 мнут полета. Благодаря доступности, Estes Proto X может отлично подойти для новичков, не имеющих навыков в управлении подобными аппаратами, а так же стать любимой игрушкой для кота.
http://www.youtube.c...h?v=1X4ZEtF6Tkg
Источник: theawesomer
#5
OFFLINE
Отправлено 20 February 2014 - 03:34 PM
У Micro Drone от Extreme Flyer есть специальная кнопка для кульбитов. также компания запустила новый проект, в рамках которого клиенты компании смогут сами скачивать и распечатывать на своем 3D-принтере аксессуары для беспилотников
http://www.youtube.c...h?v=lALgLsncJJE
#6
OFFLINE
Отправлено 21 February 2014 - 11:54 AM
Что умеют современные квадрокоптеры?

Когда речь заходит о квадрокоптерах, большинство из нас представляет себе устройство с достаточно скромными характеристиками — скорее игрушку на радиоуправлении, чем что-то, достойное наименования «беспилотный летающий аппарат». У многих вызывают недоумение инициативы вроде этой — трудно поверить, что на базе этих игрушек можно построить что-то серьёзное. Тем не менее, технологии, лежащие в основе квадрокоптеров — аккумуляторы, навигационное оборудование, бортовые компьютеры — развиваются очень быстро. Современные профессиональные беспилотники с четырьмя роторами очень сильно отличаются от любительских игрушек. Они способны летать под проливным дождём, в мороз и жару, они могут продержаться в воздухе около часа, а управлять ими сможет даже ребёнок.
В этой статье пойдёт речь о двух довольно похожих профессиональных аппаратах, предназначенных для применения в промышленности, видеонаблюдении, аэрофотосъёмке, сельском хозяйстве и военном деле. Две компании — канадская Aeryon и немецкая Microdrones как раз этой весной обновили флагманские модели своих квадрокоптеров — Aeryon SkyRanger и Microdrones md4-3000.



Aeryon SkyRanger — старший брат Aeryon Scout — полутора килограммового робота-разведчика и наблюдателя. SkyRanger весит почти вдвое больше, может держаться в воздухе до 50 минут с полезной нагрузкой. В качестве этой нагрузки в стандартной комплектации выступают обычная и инфракрасная видеокамеры, установленные на стабилизирующей платформе. Обычная камера снимает в Full HD и может делать снимки разрешением 15 мегапикселей. Инфракрасная камера работает с разрешением 640Х480. Видео с камер в реальном времени транслируется на базовую станцию, которая может находиться на расстоянии до 3 километров, с возможностью увеличения расстояния до 5 километров. Весь обмен данными с беспилотником зашифрован с помощью AES 256.
SkyRanger может работать при ветре до 65 км/ч и переносить кратковременные порывы до 90 км/ч. Он не боится дождя и снега и летает при температурах от -30 до +50 градусов. Навыки пилотирования для управления квадрокоптером почти не требуются — достаточно отметить на карте целевую точку и высоту, и беспилотник автоматически полетит к ней, ориентируясь по GPS. Джойстик нужен только для более тонких и точных манёвров.
Особое внимание компания Aeryon уделила удобству и портативности и SkyRanger — основные его части можно заменить вообще без инструментов. Квадрокоптер можно сложить, и тогда он помещается в рюкзак. В сложенном виде он имеет 25 см в ширину и 50 см в длину. Первая презентация SkyRanger состоялась на выставке CANSEC2013 в Онтарио, 29-30 мая.
Рекламный ролик SkyRanger
http://www.youtube.c...h?v=92YWhQOO4_k
Младшая модель Aeryon Scout используется для изучения животных у берегов Аляски
http://www.youtube.c...h?v=LKDFw4Wsxao

Немецкая компания Microdrones, беспилотники которой использует Google для аэрофотосъёмки, в марте этого года дополнила свою линейку квадрокоптеров настоящим гигантом. Предыдущие модели — md4-200 и md4-1000 имели грузоподъемность 200 грамм и 1 килограмм (кстати, они продаются в России под названием Гранат ВА-200 и Гранат ВА-1000).
md4-3000 поднимает до 3 кг, его максимальный взлётный вес равен 15 кг. В отличие от подавляющего большинства квадрокоптеров, он имеет аэродинамическую асимметричную конструкцию, которая создаёт дополнительную подъёмную силу при быстром полёте.
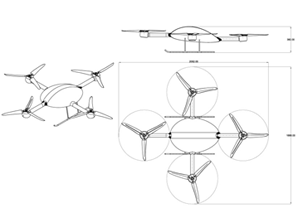
Его длина чуть больше двух метров. Он может лететь с крейсерской скоростью до 57 км/ч в течение 45 минут, а его практический потолок — 4 километра над уровнем моря. Корпус-крыло — не единственная уникальная особенность этого квадрокоптёра. Его роторы имеют по три лопасти, шаг котоорых можно настраивать перед полётом в зависимости от погодных условий и режима работы. md4-3000 летает в любую погоду при температуре от -10 до +50 градусов.
Беспилотник работает под управлением самописной ОС реального времени mdOS. Пользователям доступен SDK для программирования новых и нестандартных функций робота. Как и его канадский конкурент, md4-3000 оснащён GPS и умеет самостоятельно летать по заданному маршруту. Видео его полётов и более подробные спецификации пока не опубликованы, но его младший брат md4-1000 может дать примерное представление о его возможностях.
md4-1000 летает в проливной дождь
http://www.youtube.c...h?v=E_9TK_kn8EA
Подготовка к полёту и пилотирование md4-1000
http://www.youtube.c...h?v=-CLIpBpLV90
Без нагрузки и в помещении md4-1000 может продержаться в воздухе 88 минут подряд.
http://www.youtube.c...h?v=xw-a7dY9hIQ
Стоимость таких квадрокоптеров составляет порядка нескольких десятков тысяч долларов — твёрдой цены нет, так как основные клиенты — крупные компании, научные и государственные организации, которые чаще всего заказывают целые комплексы, оплачивают внедрение, обслуживание и установку на беспилотники специфического оборудования. При массовом производстве и некоторых компромиссах в характеристиках подобные дроны вполне могут стоить во много раз меньше. Так что планы использования квадрокоптеров не только для съёмки и наблюдения с воздуха, но и для срочной доставки мелких грузов, медикаментов или пиццы вполне могут осуществиться уже довольно скоро.
Источник: http://habrahabr.ru/company/nordavind/
#7
OFFLINE
Отправлено 27 February 2014 - 10:55 AM

Российский клуб любителей коптера DJI Phantom
Двойной полетный контроллер DJI Wookong M, дублирующий DJI Naza M V2
http://vimeo.com/87482241
#8
Гость_lanserov_*
-

- Гости
Отправлено 03 March 2014 - 03:56 PM

Многие из нас размышляли об установке камеры на летательный аппарат. Вот я и прошел этот путь. Углубившись в тонкости видеополетов от первого лица (FPV), делюсь полученными знаниями с теми, кто тоже хочет испытать новые ощущения.
Пост состоит из 2 частей. В первой — ответы на основные вопросы. Их легко найти в интернете по-отдельности, но сложно вместе: дальность полета (чем ограничивается и какая максимальная), качество картинки, грузоподъемность, стоимость и сроки (от выделения бюджета до первого полета).
Вторая часть — о сборе конкретной системы со всеми тонкостями, какие мне только удалось найти и испробовать. Что именно и где купить, как расположить на модели, зачем и что экранировать, где требуются ферритовые кольца, а где виброгасители.
Ну что же, перейдем сразу к делу.
![]()
Как оказалось, дальность управляемого полета с трансляцией видеосигнала может достигать десятков километров для планеров (ниже видео полета на 80 км. для терпеливых)
и 3-7 км для вертолетов и мультикоптеров (быстрее расходуется батарея). То есть даже на небольшом коптере можно запросто улететь в облака (красивое видео для всех).
И все же надо представлять реальные ограничения:
- Дальность передачи видеосигнала сильно зависит от количества помех в зоне полета. В центре города помех значительно больше, чем где-нибудь в поле. Поэтому дальние полеты лучше совершать за городом, что, разумеется, менее интересно. Если поблизости есть высоковольтные линии, аэродромы, космические станции и прочие источники сигнала, это может существенно сократить дистанцию уверенного приема видео.
- Разные системы передачи сигнала имеют различную способность огибать препятствия (подробно об этом во 2-й части), но надо понимать, что залететь к кому-нибудь в окно и полетать по квартире не выйдет — потеряете сигнал наверняка. За гору или пролесок тоже не вариант. Реальные полеты, как правило, проходят в зоне прямой видимости модели, пусть и на значительных расстояниях. Этому лучше всего способствуют поля.
- По-сути, дальность ограничивается лишь емкостью батареи, но для реализации всего потенциала современных технологий необходима наземная станция, которую нужно вытащить из автомобиля и стационарно разместить на поверхности. То есть, как в разных рекламах, летать более чем на 500 метров с планшетом в руках не получится. Причем с радиоуправлением проблем нет, хороший пульт безо всяких его улучшений работает на расстоянии до 3 км, а вот с видео все не так сладко. Передача данных по Wi-Fi или через сотовые сети для FPV, на мой взгляд, тоже не годится. Слишком большие задержки и риски потери сигнала превращают модель в нечто опасное как для окружающих, так и для бюджета пилота.
- Моделью довольно сложно управлять по камере, так что сразу вы не полетите уверенно. Нужны недели тренировок в безопасной зоне, прежде чем вы сможете приблизиться к живым или ценным объектам. Я бы рекомендовал сначала полетать на хорошем офисном микровертолете, научиться делать хотя бы круг и восьмерку. Цена вопроса от 2 тыс. рублей, а сэкономить можно значительно больше. Во 2-й части дам ссылки на конкретные модели. Основные сложности, с которыми сталкиваются начинающие FPV-пилоты — это контроль высоты полета и ориентация в пространстве относительно места старта. Есть системы, выводящие эту информацию на экран, но данные могут запаздывать или быть неточными. Так что тренировки просто необходимы.
- Летать с камерой придется на довольно большой (от 40 см.) и увесистой (от 1 кг.) модели, так как микрокласс не устойчив к ветру, а полеты в помещении не подходят для получения настоящего удовольствия. Значительный вес аппарата сопряжен с определенной ответственностью. Это надо понимать тоже. Тем более, что любое воздушное судно может упасть (сгоревший регулятор оборотов, мотор, электроника), а скорость порой достигает 100 км/ч., что делает полеты в городе крайне опасными. Полеты над людьми считаются неприемлемыми.
- Так или иначе вы будете зависеть от погоды. В холод быстрее разряжаются аккумуляторы, крайне некомфортно готовить полет и управлять моделью. В ветер летать в принципе можно, но управление становится неестественным и “нет в этом кайфа”. После захода солнца с хорошей камерой летать тоже можно, но удовольствия опять-таки никакого. В дождь летать не принято, так как это увеличивает риск выхода из строя электроники. Хотя, конечно, зависит от вас и от выбранной зоны полетов.
Несмотря на все ограничения, профессионалы позволяют себе летать везде. Вот, например, Лондон.
Очевидно, что для максимально продолжительного полета нужна оптимальная батарея. По этой теме нашел одну интересную статью. Здесь утверждается, что вес батареи должен составлять 87% от веса модели без батареи. Это позволяет реализовать 83% всего потенциала полетного времени модели, используя лишь 61% от максимального ее веса.
![]()
Летать можно 2-мя способами. С помощью монитора или в очках.

У меня сейчас мониторчик около 5 дюймов, закрепленный прямо на пульте. Для тестовых полетов этого хватает. Реальное погружение достигается с помощью видеоочков, так что их характеристики важнее, тем более что выбор монитора зависит скорее от фантазии пилота. Если не брать hi-end, то современный рабочий вариант очков имеет разрешение 800x600, чего более чем достаточно. Конкретные модели очков разберем во 2 части.
С камерами сложнее. После некоторых исследований (описание во второй части) и выслушивания потоков противоречивой информации (одни будут уверять вас, что нужна отдельная курсовая камера, другие, что это не так), я все же понял, что для полетов нужна отдельная курсовая аналоговая камера. Такие продаются с CMOS, CCD и PIXIM-матрицами.
Внутри типов различаются по количеству линий телевизионной развертки (TVL). Видел в продаже от 490 до 700. По габаритам есть отличия в платах (32x32 мм. — наиболее подходящие, 38x38 и 42x42). В итоге мой выбор пал на лучшую, на мой взгляд, камеру с PIXIM-матрицей. Разрешение 690 на 460 (690 HTVL, 490 VTVL). Настраивает экспозицию для каждого пикселя отдельно (что-то наподобие HDR в фотографии, только для видео), так что и солнце видно, и траву в этот момент можно различить. В темноте сама переключается в ночной режим. Спокойно переносит любые вибрации, никаких эффектов типа “Желе” не обнаружено.

Правда, на уровне ощущений, даже на отличной камере детализация низковата. Атмосферу не чувствуешь, и какие-то шумы присутствуют. То есть функционально камера отрабатывает на 100%, а эмоционально — это, конечно, не кино. Насладиться красотой пейзажей можно потом, в записи со второй цифровой HD-камеры, а не в процессе полета.
Кстати, помех оказалось меньше, чем ожидал. Иногда что-то может промелькнуть, но в зоне уверенного приема все более чем стабильно. Видео ниже наглядно показывает характер помех и их, я бы сказал, максимальную частоту.
Конечно, блики на экране позволяют получить информацию только о помехах, а не о качестве картинки, но ничего лучше не нашел — уж слишком остальные ролики, без бликов, разбавлены однотипными и продолжительными вступлениями.
![]()
Этот вопрос волнует многих начинающих, но совершенно не волнует посвященных. Любая устойчивая модель сама весит от 1 кг и может спокойно поднять в воздух все, что необходимо в полете. Для перевозки тяжелых грузов, обычно, модели не собирают, так как затея того просто не стоит. Для любой профессиональной задачи давно придуман какой-то более рациональный вариант. Вот видео, где мультикоптер с лучами всего по 35 см. поднимает более 20 кг (подъем на 3 минуте).
Существуют специальные калькуляторы, позволяющие рассчитать модель под нужные параметры. Например, вот этот. Здесьнюансы его использования.
![]()
Конечно, самый простой вариант — купить готовую модель. При этом вы заплатите наценку на каждую деталь отдельно, плюс за сборку от 5 до 25 тыс. в среднем, и прождете ее неделю-две. Может, вам повезет, и вы купите модель после кого-то без наценок и сразу. Правда, не факт, что это будет именно то, что вам нужно. Я же решил подойти к вопросу более осознанно и сконфигурировать все по-отдельности, но покупая у нас в магазинах для экономии времени в ущерб экономии денег. Вышло около недели или двух вместе с отладкой. Если заказывать все из Китая-Тайваня-Америки, то прибавляем еще недели 3 на доставку, но выйдет дешевле процентов на 20-30.
Также скажу, что Москве еще есть комплектующие, а в Питере, например, все уже сложнее. Приходится ориентироваться на наличие, а не на желания, и ездить в весьма удаленные районы. В других регионах не знаю, но думаю — интернет остается единственным разумным вариантом.
Прибавьте ко времени еще и полеты на тренировочном микроклассе или симуляторе. Еще неделю, может.
Итак, первая часть подходит к концу. Если вы не остыли и желаете дальнейшего погружения в мир FPV, предлагаю вашему вниманию вторую часть, в которой будут освещены следующие вопросы:
- Выбор модели: самолет, вертолет или мультикоптер?
- Тренировки. Вырабатывание летных навыков.
- Выбор конкретной конструкции и размера
- Подбор пульта управления и приемника его сигналов
- Полетный контроллер и автопилот. Что подходит для FPV.
- Механическая часть (винты, моторы и т.п.)
- Аккумуляторы и зарядка
- Видео. Количество и тип видеокамер.
- Видео. Подвесы и кронштейны для камер.
- Видео. Передатчик и приемник.
- Видео. Очки и мониторы.
- Полетная информация прямо на экране. Телеметрия. OSD.
- Монтаж. Термоусадка, фильтры, экранирование и ферритовые кольца.
Надеюсь, было интересно. Ссылка на вторую часть ниже. Вот еще одно видео на прощание)
Источник: http://habrahabr.ru/post/196884/
#9
Гость_lanserov_*
-
- Гости
Отправлено 03 March 2014 - 04:56 PM

Спасибо каждому, кто читал и комментировал первую часть. Если еще не читали — рекомендую это сделать. Там мало текста, и есть классные видео.
Изначально планировалось, что эта часть будет завершающей. Но, для удобства попадания в скролл, сейчас остановимся лишь на этих вопросах:
- Тренировки. Вырабатывание летных навыков.
- Выбор модели: самолет, вертолет или мультикоптер?
- Выбор конкретной конструкции и размера
- Моторы и ESC
- Полетный контроллер
Как обычно, сразу к делу.
![]()

Думаю, что каждый из нас, прежде чем собрать что-то большое и дорогое, хочет убедиться в том, что он сможет на этом летать. А еще, тренировка поможет решить — ваше это хобби вообще или нет.
В принципе, есть 2 пути, которыми можно пойти. Первый — это симулятор. Этот способ отлично подходит тем, кто собирается пилотировать планер или летающее крыло.
Симулятор в комплекте с тренировочным пультом стоит денег. А покупать хороший пульт, совместимый с симуляторами, нет смысла, пока вы твердо не решили собирать большую модель. Если ваша цель — FPV, летать на симуляторе может быть еще и скучно.
Если же вы ориентируетесь на полеты на мультикоптере, то имейте в виду, что разные полетные контроллеры обеспечивают столь различное управление аппаратом, что универсальный симулятор вам не поможет.
Второй способ — значительно более увлекательный. Рекомендую выделить 2-3 тысячи рублей и купить микровертолет. Получается дешевле симулятора, а для мультикоптера подготовит вас просто отлично.
Почему не микрокоптер? Во-первых, микрокоптеры не имеют тех режимов, которые вы будете использовать на большом аппарате. Они летает совсем иначе. Во-вторых, навыка полетов на вертолете хватает с небольшим избытком, что придаст вам большей уверенности в своих силах, и сразу расширит ваш кругозор в этой области. В-третьих, полетать на хорошем микровертолете — это, действительно в удовольствие. Если вертолет не придется по вкусу, попробуйте все же симулятор с планером. Может крылья — это как раз ваше.
Почему именно микровертолет? Он подходит как для полетов в комнате, так и для уличных экспериментов при малом ветре. Это удобно для тренировок. Хороший микрокласс действительно сложно сломать. Научиться делать круг или восьмерку на таком аппарате можно за несколько дней, после чего образ управления мультиротором из сложной абстракции превратится в простейшую арифметику.
Ниже идет описание типов и принципов работы микровертолетов, которое занимает 30% всего объема 2-й части. Если вы знаете что такое 4-х канальная классика и фиксированный/коллективный шаг, щелкните здесь для телепортации сразу в выбор FPV-модели. В этом разделе я в итоге рекомендую WLToys V911. Если же вы начинающий, читайте дальше, и откроете для себя мир микровертолетов заново.
Для начала скажу то же, что и многие до меня. Вам категорически не подходят 2-х и 3-х канальные модели, продающиеся в продуктовых магазинах. Это не вертолеты, а летающие вентиляторы.
Канал управления — это возможность плавного или дискретного изменения уровня какого-либо управляющего сигнала. Очень приблизительно можно сказать, что у автомобиля их 2: управление скоростью и направлением (реально их больше из-за коробки передач и разделения газа и тормоза).
А теперь представьте вертолет с 2-мя каналами? Что вообще он может? Он либо летит всегда вперед с возможностью изменения высоты и поворота носа, либо не умеет поворачивать, зато может изменять скорость.
3-х канальные вертолеты недалеко ушли от 2-х канальных. Как правило, они соосные, но бывают двухроторные или под классику. Классический 3-х канальный вертолет выглядит так:
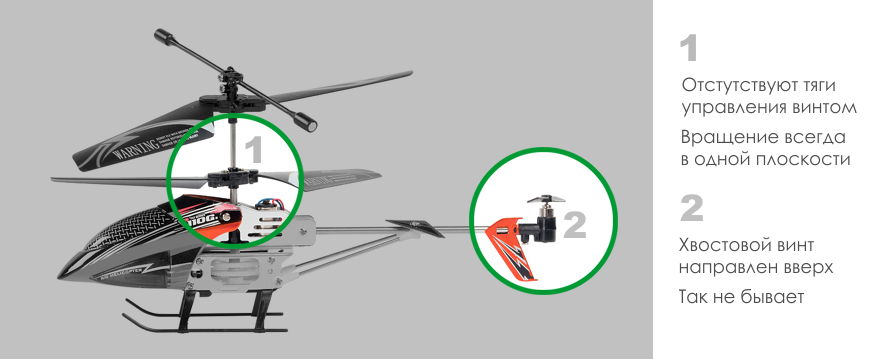
Такая модель летает вперед и назад за счет заднего винта, приподнимая и опуская хвост. Нормальные же офисные вертолеты делают это за счет основного винта, предоставляя пилоту возможность управления еще и креном (раскачивание по продольной оси, позволяющие скользить вправо-влево), но об этом позже.
Управление высотой полета здесь достигается изменением скорости обоих основных винтов. В более серьезных моделях изменяется не только скорость вращения лопастей, но и их шаг, то есть их угол наклона по отношению к плоскости вращения (установочный угол, угол атаки).
Поворачивает этот вертолет, изменяя скорость одного из винтов. Они вращаются в противоположных направлениях на одной оси. Какой закрутился быстрее, туда и летим.
Один из признаков, выделенных на верхней иллюстрации, обязательно присутствует в плохом вертолете. Не дайте себя обмануть, что бы ни было написано на коробке (или на лице у продавца).
Пульт у таких “пропеллероидов”, как правило, инфракрасный, требует отражения от стен, что ограничивает его применение в принципе.

У нормального вертолета пульт обязательно имеет свободный ход стиков в любых направлениях, хоть по диагонали — это и есть реализация 4-х канального управления с возможностью ручного микширования.
Обычно новичкам рекомендуют 4-х канальный соосник. Соосная схема подразумевает наличие сразу двух винтов на оси, как и в предыдущей группе. Но теперь у нас есть управляющие тяги, идущие от винта в корпус машины. Если говорить точнее, они крепятся к аппарату перекоса, управляющему углом атаки лопастей (циклическим шагом). Обычно, такая система называется фиксированный шаг, так как лопасти поворачиваются только обе вместе и не имеют возможности поворота относительно друг друга. Выглядит это следующим образом.
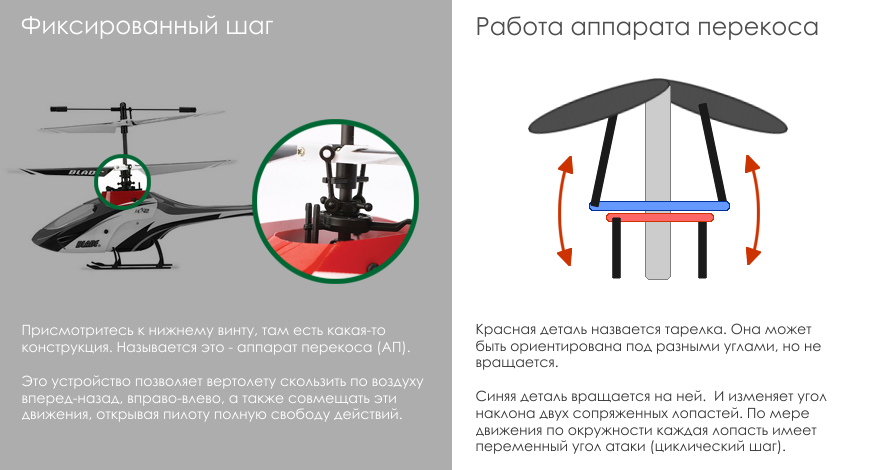
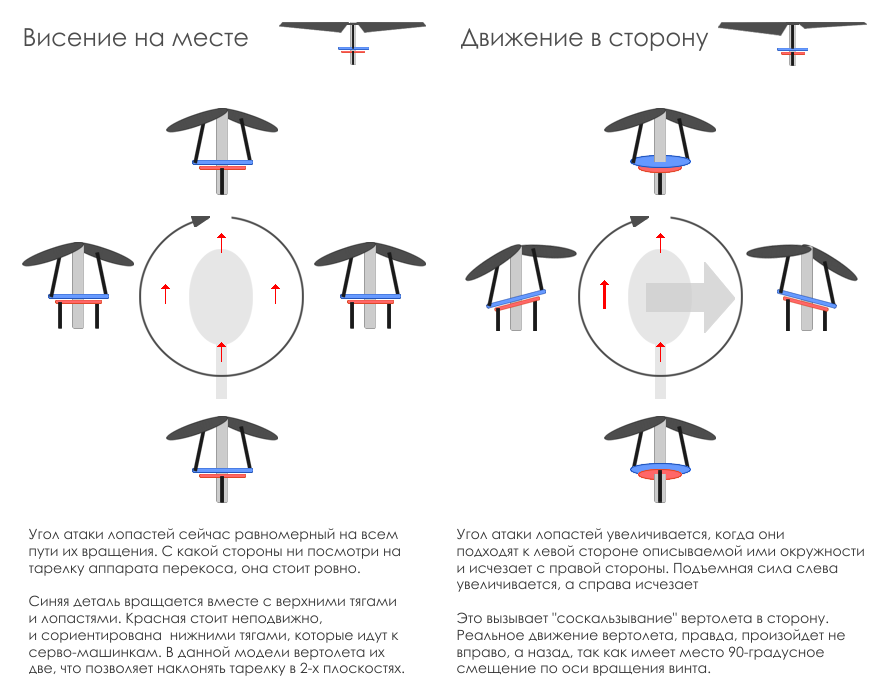
Аппарат перекоса позволяет вертолету совершать “скользящие движения” в любом направлении, и вправо, и вперед, и по диагонали. При этом можно не менять курс, то есть положение носа. Это максимально приближает управление вертолетом к управлению мультикоптером.
Как это работает? Каждая лопасть по мере движения по кругу изменяет угол атаки. Чем резче наклонить ее к плоскости вращения, тем сильнее она будет стремиться наверх, то есть поднять вертолет. Поскольку лопасти этого винта имеют жесткую продольную сцепку (так называемый фиксированный шаг, fixed pitch, FP), в то время как на одной стороне винта угол атаки увеличивается, на другой стороне он уменьшается. Туда, где он меньше, и перевешивает вертолет.
Поворот вертолета вокруг оси осуществляется по-прежнему за счет изменения скорости одного винта относительно скорости другого. Хвостовой винт здесь вообще не нужен, но иногда его ставят без привода для красоты. В Китае, видимо, не видели настоящих соосных вертолетов, и им кажется, что винт сзади нужен для реалистичности.
В результате имеем 4 канала управления:
- Скольжение вперед-назад (тангаж)
- Скольжение влево-вправо (крен, roll)
- Выше-ниже (газ, throttle)
- Поворот носа (рысканье, rude, yaw)
Пульт уже, как правило, радио. Бывают мегагерцовые и гигагерцовые. Первые с длинной выдвижной антенной, вторые без. 2.4 ГГц самое то.

Если честно, мне не понравился соосник. Да, на нем можно летать по офису. Но как-то все топорно происходит. Может, конечно, мне не повезло с моделью. Это была “Стрекоза Мини”. Она постоянно ломалась, и с нее слетал флайбар (стабилизирующая палка с грузиками на макушке).
Но думаю, что дело не в модели, а в классе самом по себе. Соосник очень устойчив, и на нем хорошо получается висеть на месте. Он может сделать какую-то фигуру. Но сделать это как-то неестественно, не как вертолет, а скорее как мультикоптер в недостаточном, замкнутом пространстве.
Еще один досадный недостаток заключается в том, что соосник не может бороться с ветром. Его верхний винт неуправляем, и на ветру по-сути становится парусом, уносящим вертик вдаль. А ведь рано или поздно захочется полетать на улице, прочувствовать — как оно вообще.
Если вы почему-то все-таки хотите такой, из качественных рекомендую Blade mCX2.
Когда я купил микровертолет классической схемы, в магазине сказали, что я и через 2 недели на нем не взлечу. Это оказалось не так. Через пару дней на нем смог взлететь не только я, но и все кто за это брался.
Чем же он отличается от соосника? Да по-сути только тем, что второй (рулящий) винт у него сзади на хвосте, как положено. Настоящие соосные вертолеты имеют оба управляемых винта, а игрушки — только нижний (верхний, как я писал, это — парус). А вот классическая игрушечная схема уже мало чем отличается от настоящей. В результате мы получаем более “вертолетный” вертолет. Вот как он выглядит:

Врагов у этого вертолета не обнаружено. А вот он является врагом ЖК-телевизоров и автомобилей, так что летайте свободно, но все же будьте аккуратны. Ниже видео, на котором я попытался убить этот вертолетик.
Если использовать терминологию — это вертолет классической схемы с фиксированным шагом и флайбаром. В продаже есть и более шустрые бесфлайбарники с фиксированным шагом. Роль палки с грузиками там играет компьютер. Отсутствие флайбара делает модель более устойчивой к ветру. С другой стороны, у них более массивные лопасти, которые вращаются намного быстрее. Так что испортить что-нибудь в квартире или офисе шансы увеличиваются.
Из качественных опять-таки рекомендую Blade. На этот раз это модели mSR X без флайбара и mSR с флайбаром. Хотя, если ваша цель — FPV, зачем вам качественный микровертолет, V911 не разочарует на время тренировки точно.
Для справки, раз уж нас занесло в микрокласс, есть модели еще круче. Но! Они не подходят для квартиры. Они созданы для пилотов, которые хотят попробовать себя в 3D-полетах, а не в FPV. Это — микровертолеты с коллективным шагом. Обычно, обозначаются как CP (Collective Pitch). Тарелка перекоса у таких вертолетов управляется не двумя, а тремя серво-приводами.

Таким образом, она свободно перемещается в 3-х измерениях. То есть она может иметь не только любой наклон, но и позиционироваться на различном расстоянии от винта, приподнимаясь или опускаясь чуть ниже по оси вала.

Такая конструкция позволяет сохранить всю функциональность вертолетов из предыдущей группы, добавив возможность изменения угла между лопастями. То есть здесь можно управлять не только циклическом шагом (подъемной силой на какой-либо стороне винта), но и общим (суммарной подъемной силой винта). А это, в свою очередь, приводит к управлению высотой полета без изменения скорости вращения винта, кроме того, позволяя перевернуть подъемную силу винта для 3d-пилотажа. То есть вертолет может летать “вниз головой”.
Управление таким вертолетом сложнее, так как он не стабилизируется сам. То есть, если вы наклонили его вперед, он будет продолжать движение даже после возвращения ручки на пульте в центральное положение. Чтобы зависнуть, придется совершить противоположное компенсирующее движение ручки.
Из версий, которые еще могут летать в помещении, есть Blade CPX nano. Аппарат привлекательный, но отзывы о нем не очень. Двигатели быстро горят.
Blade mCPX v2 чуть больше, и является очень удачной моделью. Но ему самое место в спортзале или на улице. У нас стоит около 7000 рублей без ДУ.
Есть еще более заряженная версия на бесколлекторных двигателях, которую я собственно и заказывал, впоследствии отказавшись от нее в пользу квадрокоптера. Назвается Blade mCPX BL. Единственный минус — в квартире или офисе ну совсем нельзя, опасно. Цена около 9000 рублей в магазинах без пульта ДУ.
![]()
Коптер, вертолет или самолет? Перед тем, как приступить к этому разделу, пришлось серьезно подумать. Таблицы сравнения здесь не годятся, это все равно, что сравнивать мотоцикл и катер. Навязывать свое мнение тоже не хочется, так как оно не может быть объективным.
В общем, для полноценного FPV и съемки интересных роликов нужен как самолетик или летающее крыло, так и мультикоптер.
Венеция. Съемки с участием квадрокоптера и летающего крыла.
Решайте сами с чего начать. Планер дешевле и более романтичный, а мультикоптер более технологичный, и немного похож на НЛО.
Лично меня подкупили возможности мультикоптера зависать на месте (планер-то всегда в движении), исследовать высокие вертикальные объекты, совершать облет объекта по кругу камерой к нему. Да и потом, после микровертолета переходить на него как-то проще.
Планеры и летающие крылья более зависимы от ветра, но не подвержены вибрациям, и имеют большую дальность полетов и скорость. Ими тяжело управлять на малых высотах, но у кого-то это получается прекрасно:
Летающее крыло на малых высотах
На видео — летающее крыло TBS CAIPIRINHA за $265 без приемника и ДУ. Есть версия помасштабнее — TBS ZEPHYR от $1300. В комментариях к первой части появилась ссылка на доступный и популярный планер Bixler за 2000 руб. без регулятора оборотов, приемника, передатчика и батареи.
Вертолет для FPV и съемки подходит только большой и стабильный. Управлять им очень сложно. Это — коллективный шаг, со всеми вытекающими. Если вы новичек — вертолетное FPV будет крайне опасным.
Сейчас предлагаю остановиться на мультикоптере. Про планеры же пообщаемся как-нибудь в другой раз. Скажу лишь, что летающее крыло отличается от классического самолетика или планера тем, что не имеет киля, то есть руля. Функции поворота у него замикшированы с управлением креном, и вы имеете всего 3 канала управления.
![]()
Минимальный размер мультикоптера для полетов в облака — 450 мм по диагонали без учета винтов. Если вы желаете ограничиться полетами во дворе или в парке, а пульт еще не купили, рекомендую присмотреться к готовому квадрокоптеру DJI Phantom или DJI Phantom 2 установить на него цифровую камеру GoPro Hero. Вместе с пультом он стоит от 18000 рублей. Это очень качественная вещь от мирового лидера.
На Фантомах летают до 2 км и это не придел.

На нашем форуме и в группе http://vk.com/djiphantom вы найдете много видео роликов.
Итак, мультикоптеры бывают разных типов:
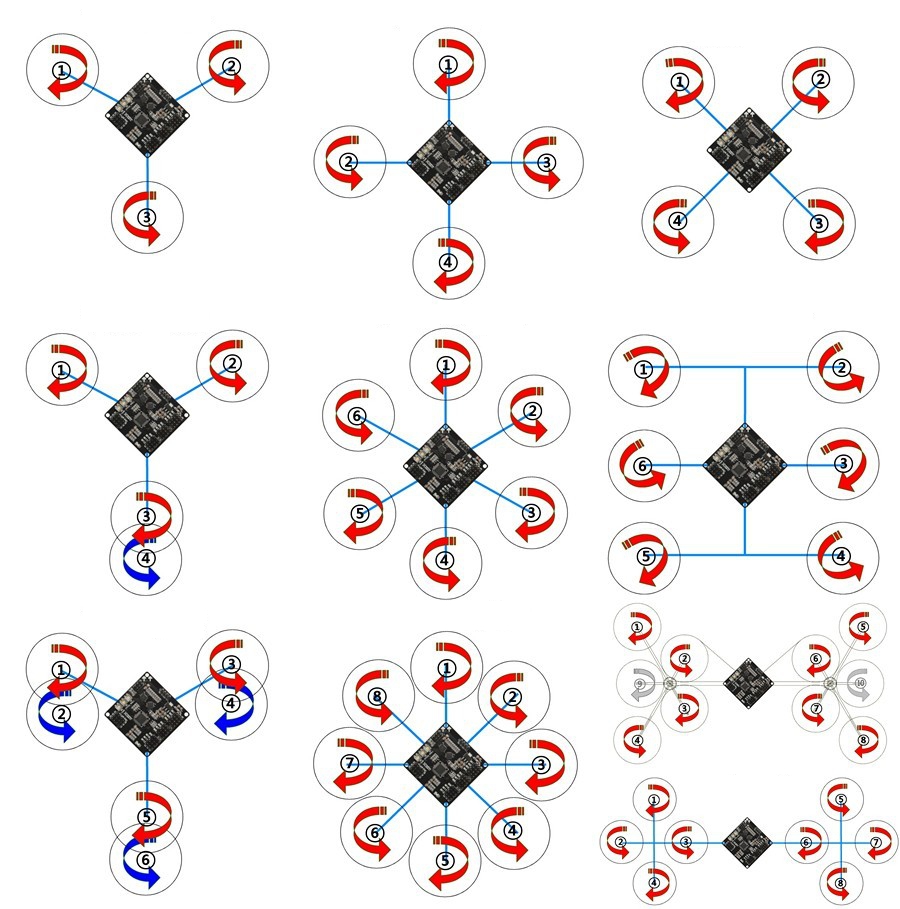
Для FPV подходит X4, то есть квадрокоптер. +4 не годится, так как луч спереди будет мешать камере. X6 (гексакоптер) может нести большую нагрузку на борту и не падает в случае поломки одного из моторов. Но поломки случаются редко, а зеркальную камеру для FPV возить с собой не обязательно. X8 (октокоптер) собирают для чего-то совсем тяжелого, типаRED-EPIC или полноформатной зеркалки. А еще к нему можно приделать захват или такую руку для жестикулирования окружающим:
Из качественных X6 и X8 опять-же DJI или складные рамы от Tarot. Конечно, такой аппарат тяжелый, большой и дорогой, но видео получается совсем другого качества.
Видео с октокоптера и гексакоптера:
Есть еще трикоптер. У него всего 3 луча. Он очень маневренный, но сложный по конструкции и не очень надежный (мотор на заднем луче меняет угол наклона, этот привод иногда выходит из строя). Скорее, представляет собой экзотику, но крайне интересную. Как первый аппарат — пожалуй, очень смелый шаг, но преимущества его такие:
- Самое комфортное снижение среди всех мультироторов
- 120-градусный угол между передними лучами позволяет снимать широкоугольное видео без винтов в кадре
- Высокая скорость разворота обеспечивает возможность съемки быстродвижущихся объектов
- Интересное управление и ощущение полного контроля модели

Вернемся же к самой распространенной FPV-схеме — X4. Из качественных рам для квадрокоптеров имеются DJI F450 и ее FPV-мод TBS Discovery. Первая от производителя упомянутого выше Phantom, а вторая от известной FPV-команды Black Sheep.
В чем же преимущества платформы TBS Discovery и почему она так популярна?

- Передние лучи разнесены на больший угол по сравнению с симметричной конструкцией F450, что позволяет с легкостью разместить широкоугольную камеру не захватывая в картинку винты
- На раме выполнена разводка под монтаж основной электроники. Это не просто аккуратно и эстетично, но еще и облегчает модель
- В TBS Discovery используются стандартные лучи от платформы F450, которые можно купить в любом специализированном магазине даже в России
- К этой платформе вполне подходят различные распространенные моторы и регуляторы оборотов (ESC)
- Команда Blask Sheep продает не только раму, но и множество проверенных и оптимизированных комплектующих и аксессуаров для FPV
- Можно сказать, что TBS Discovery — это модно. Особенно в сочетании с их фирменным жилетом.
- Рама имеет места крепления для 2 камер — курсовой и записывающей. Также есть возможность крепления pan/tiltServoCity DDT500 Direct Drive Tilt и 2D-подвеса Tarot (есть даже версия рамы вместе с интегрированным фирменным подвесом)
- Аккумулятор размещается между пластинами рамы, что обеспечивает надежность его крепления и хороший внешний вид хорошую аэродинамику
Недостатки тоже есть:
- Модель имеет разные характеристики полета вперед-назад и вправо-влево, она не похожа на НЛО, если ее крутить вокруг оси в полете.
- Модель не складывается. Это — существенный недостаток. В противовес предлагают стильный, но огромный кейс для транспортировки.
- Продуманность готовой конструкции может несколько ограничить спящего в вас “Кулибина” (и уж тем более, не спящего). Не представляю, как можно разместить на этой раме что-то дополнительное, кроме подвеса.
- Считаю их цены приемлемыми, но есть варианты и дешевле. Есть даже клоны, причем разные. Мазератти или заряженный Ссанг-Йонг, решать только вам, но разница в цене тут совсем другая. Так, оригинальная рама стоит $75, а клон $30. Причем, оригинал имеет разводку на плате.
- Придется либо долго ждать посылку, либо искать в России с наценкой 30% + расходы на доставку. Иногда производитель не может отгрузить товар вообще.
Плюсов все же больше, чем минусов, и TBS Discovery — пожалуй, единственное, что я могу рекомендовать с чистой совестью. В первой части вы уже видели зрелищное видео из Лондона. Вот еще несколько роликов. Они менее эффектные, зато позволяют лучше понять, как это будет на самом деле:
Возможности TBS Discovery с подвесом для камеры:
Очень уверенное FPV с забавной аварией в конце
Вид со стороны, настройка электроники и тестовый полет
Если найдете DJI F450 в наличии где-то рядом, можно собрать сначала его с расчетом на замену рамы от Black Sheep, когда придет посылка, и если появится желание. К тому же, вы успеете получить кое какой опыт. Платформа F450 тоже неплохая, вот видео
Возможности DJI F450
В заключение этого раздела скажу, что рама не так уж важна. Вы можете сделать ее даже сами. Мне вообще продалиHornet 460 по причине моей неопытности в этом вопросе. Профессионалы уверяли, что я должен выбросить его. Поскольку вразумительно ответа на вопрос — почему — не последовало, я не выбросил, а сделал из него хороший коптер. Меньше мусора нашей родине.
![]()
Квадрокоптер, как правило, летает на 4 двухлопастных винтах без управления шагом, то если никакие автоматы перекоса ему не нужны. Подъемную силу на краях можно регулировать просто изменяя скорости вращения моторов относительно друг-друга. Разумеется, используются электрические двигатели. Для полноты картины, правда, размещу видео с некоторыми исключениями:
Нитрокоптер с коллективным шагом (видео скучное)
Изменяемые плоскости вращения винтов для управления наклоном корпуса (весело)
Но это так, понятное дело, для справки (депутаты, второе видео, если что — фейк, то есть не совсем правда). Обойдемся без оружия в нашем FPV. Моторы для коптеров используются бесколлекторные и различаются по размеру, мощности, диаметру вала и величине kV. Конечно, у мотора есть еще и масса.
Для Discovery подходящий размер — это 22x12 мм. (Ø28x26-28 мм.) или 22x16 мм. (Ø28x30-34 мм.) (рекомендуются). Если будете собирать другой коптер — без труда сориентируетесь в подходящих типоразмерах.
kV — это теоретическое количество оборотов, выдаваемое мотором на каждый подающийся на него вольт, при работе без нагрузки (винта). Вообще, Discovery нормально летает на моторах от 700 до 900kV, как и любой соразмерный коптер. Можно попробовать и большие значения, например 1200kV.
В сущности, мотор с низким kV имеет больше витков более тонкой обмотки. Он будет работать с меньшим напряжением большего тока, и давать больший крутящий момент. Это позволит использовать большие винты, позволяющие достичь большего ускорения. Высокий показатель kV будет работать с меньшими винтами, обеспечивая, может быть, меньшее ускорение, но большую скорость.
Я, уж было, совсем запутался со связкой kV, напряжением батареи, силы тока и размером винтов, пока не представил наглядную модель с коробкой передач автомобиля.
Представьте, что kV — это передача, передаточное число. На 1 передаче мы быстро трогаемся, но также быстро и упираемся в предел скорости. На 3 передаче мы можем разогнаться быстрее, но трогаться будем медленно.
В отличие от автомобиля, коптер не имеет коробки передач, и нам нужно выбрать передаточное число раз и навсегда. В автомобиле мы бы руководствовались мощностью, оборотами двигателя и полной массой. Например, обычный двигатель с рабочими оборотами, скажем, 3000 в минуту, при 90 лошадиных силах и весе автомобиля 1 тонну — всегда вторая передача, 1.5 тонны — первая, а 400 сил на 2 тонны — третья. В коптере вместо мощности двигателя у нас ток с аккумулятора, вместо оборотов — напряжение сети, а вместо веса — винты. Поэтому, мотор с большим значением kV может не подойти для больших винтов (на высокой передаче много веса не разгонишь). Теоретически, к нему можно было бы подключить высоковольтный аккумулятор (аналог оборотистого двигателя) с большой мгновенной отдачей тока (аналог большой мощности), но мотор может выйти из строя (поломка коробки передач). Надо также понимать, что ресурс батареи ограничен, и использование большей передачи будет требовать больше тока, что приведет к меньшему полетному времени, хотя полетаете вы и интереснее.
Никогда не включайте бесколлекторный мотор без нагрузки на максимальную мощность, kV — это исключительно теоретическая величина. С винтом оборотов будет меньше, а без него может выйти из строя ESC.
Понятно, что все аналогии в тексте выше условны, но иначе просто невозможно описать взаимные влияния элементов конструкции друг на друга. Если пост читают профессионалы, предложите что-нибудь в комментариях, пожалуйста.
Для работы бесколлекторного двигателя нужен еще и регулятор оборотов (ESC, иногда просто: контроллер, регуль). Напрямую к батарее мотор не подключить, так как он трехфазный и имеет 3 контакта, а не 2. ESC различаются по максимальному току, с которым они в состоянии работать. Самые распространенные — 30А, но можно использовать и менее мощные вплоть до 18А (об этом ниже). Рабочая частота нормального ESC — от 400 Гц. По отзывам опытных любителей разницы между 450 Гц и 1 кГц (новые Afro ESC) не обнаружено.
Здесь стоит добавить, что регулятор управляет оборотами мотора дискретно. Так, чем меньше kV, тем более точная регулировка обеспечивается. Это как воображаемый дискретный газ в автомобиле — чем ниже передача, тем более точный контроль изменения скорости.
Если диаметр вала на моторе меньше, чем нужно для винта, можно использовать адаптер. Если больше — тоже можно адаптировать.
Для Discovery производитель рекомендует моторы 750KV. Их фирменные моторы, это на самом деле брендированные RCTimer A2830-14 750KV 185W с валом 3.175 мм и адаптером под винты на вал 5 мм. Может, найдете где-то в России такое. Что написано на моторчике все равно издалека не видно.
Для более динамичных полетов и уменьшения вибрации в продаже у Black Sheep имеются моторы 900KV с улучшенными ESC TBS BULLETPROOF 30A в комлекте. На самом деле — это моторы Tiger Motors MT2216-10 / MT2216-11 900KV 210W с валом 5 мм и переклеенными этикетками. Но нужно понимать, что в случае с этими моторами лучше использовать оригинальные ESC TBS Bulletproof.
Если оригинальных ESC ждать не хочется, вам в помощь:
- RCTimer SK ESC 30A — те же самые, но с другой наклейкой
- HobbyKing F-20A/F-30A BEC программируемые ESC с прошивкой SimonK
На моторах 750KV можно летать 10-12 минут с батареей 4S 3.3Ah. На 900KV — 6-8 минут с той же батареей, и до 11 минут с 4.5Ah 4S.
Подробнее о батареях и монтаже ESC я напишу в следующей части.
Если вы не хотите ограничиваться проверенными и оптимальными вариантами, можете рассчитать коптер самостоятельно, вот инструменты:
- eCalc multicopter — подбор оптимальных винтов
- eCalc — подбор комбинации мотор-винт
- Adamone motorcalc — подбор комбинации мотор-винт
![]()
Почему выбор контроллера так важен? Дело в том, что управление и характеристики вашего квадрокоптера в большей степени зависят от электроники и моторов, чем от рамы. Причем, моторы влияют на летные качества аппарата, а контроллер — на его управление и функциональность.
Вообще, компания DJI, помимо платформы F450 и квадрокоптера Phantom, по счастливой случайности выпускает еще и один из лучших контроллеров для мультикоптеров. Есть профессиональная серия Wookong M/A2 и любительская — Naza, в вариантах V2 и Lite.
Теперь о каждой из них по порядку.
Выбирайте Wookong или A2, если занимаетесь коммерческой фото- и видеосъемкой. Wookong в сочетании с октокоптером и хорошим подвесом образуют серьезный и дорогой аппарат стоимостью от 250000 рублей. Сам контроллер стоит около $1000, что дорого для любительского FPV. Функциональность позволяет совершать полет по маршруту в Google Maps (до 50 точек), управлять полетом с компьютера (при апгрейде до наземной станции), фокусироваться на точке интереса (видео ниже), следовать за точкой интереса и т.п.
Naza V2 является промежуточным звеном между любительской Naza Lite и профессиональными Wookong и A2. От старшего брата V2 отличают более слабая аппаратная часть, 16 точек на карте вместо 50-ти, отсутствие специальных режимов с точкой интереса, отсутствие поддержки наземной станции на iPad и худшая стабилизация в полете. На мой взгляд, вариант с V2 для профессионалов — спорный, т.к. при возникновении нетривиальных профессиональных задач вы будете понимать, что вам не хватило бюджета на Wookong, и теперь что-то не оптимально. Naza V2 скорее для любителей FPV, которые хотят поиграть в профессионалов, или профессионалов, для которых аэросъемка является несущественной частью работы. Цена от 15000 рублей в России.
Для квадрокоптерного FPV больше всего, пожалуй, подходит Naza M Lite. Стоит она недорого (от 8000 рублей в России в комплекте с GPS), функциональность у нее максимально урезана, что ускоряет привыкание. Летает же при этом она просто отлично. Новичка порадует полный пакет «для пилотов-чайников», о котором расскажу ниже.
Справедливости ради отмечу, что Black Sheep также не против установки на Discovery контроллера OpenPilot CopterControl. Но, во-первых, его замучаешься настраивать, а во-вторых, он подходит для акробатики, а не для FPV с начинающим пилотом.
Если какой-то продавец начнет объяснять вам, что Lite не точно приземляется и имеет худшие летные качества по сравнению с V2, заткните уши — это заметно только при профессиональной видеосъемке для которой Discovery, в принципе — не лучший вариант. А еще Lite имеет функцию стабилизации 2-х осевого подвеса.
Автопилот сажает коптер с Naza Lite не с точностью 15 метров, как заявляют некоторые профи, а с точностью 0,5-1,5 метра, в зависимости от ветра. Специально для поста сегодня записал видео с посадкой в режиме автопилота на обочину дороги. В точности туда же, откуда взлетел.
Реальное отличие в том, что V2 может летать по точкам на карте и подключается к фирменной системе DJI OSD (полетная информация на вашем экране). Таблица сравнения Naza. Проблема в том, что TBS Discovery тоже имеет фирменную OSD. И ни одна ни вторая OSD нам не пригодится. Позже я опишу более информативную, легкую и дешевую OSD от китайцев.
Если вы хотите поиграть в автопилот с точками на карте, берите полную версию (V2), но в случае с FPV лучше на сэкономленные деньги купить билет до острова Санторини и полетать там среди красивых видов.
Каждый контроллер от DJI имеет встроенную виброизоляцию чувствительных элементов и режимы HomeLock, CourseLock и Attitde. HomeLock позволяет управлять коптером без учета текущего положения его носа. То есть ручку на себя — он летет к вам, вправо — он летит вправо относительно вас. Это удобно, когда аппарат далеко от вас, и вы не видите как он к вам повернут. CourseLock делает тоже самое, только ориентируясь не на точку, с которой его запустили, а на первоначальную ориентацию носа. Attitde превращает ручку газа в регулятор высоты полета, где среднее ее положение — удержание текущей высоты.
GPS. Версии Lite бывают с ним и без него. Нам — только с ним. В чем суть вопроса: к полетному контроллеру добавляется такой блинчик на палочке, в котором расположены приемник GPS и магнитный компас.
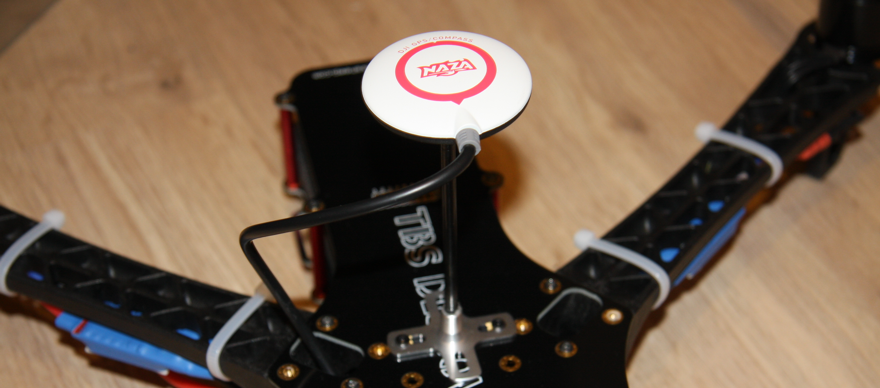
При подключении этого девайса к контроллеру появляется режим GPS Attitude, в котором электроника стабилизирует как высоту полета коптера, так и его положение в пространстве. То есть, если вы устали, приближается автомобиль, лошадь или красивая девушка, вы можете отпустить ручки (стики) на пульте, и коптер просто зависнет в воздухе до тех пор, пока ситуация не изменится. Если вы не знаете как приземлить его, вы можете просто выключить пульт и он сядет сам туда, откуда вы его запустили (читайте инструкцию).
Рекомендую всегда проводить калибровку компаса перед полетами. Даже если вы летаете на том же поле, что и в прошлый раз. Ниже видео неудачной авто-посадки из-за пренебрежения этим правилом.
Режим GPS Atti будет полезен вам на протяжении нескольких недель полетов. Постепенно, на безопасной высоте, вы станете отключать его, привыкая к более шустрому режиму Attitude (только контроль высоты). Например, максимальная скорость моего коптера в режиме GPS Atti — 65 км/ч, а в режиме Attitude — 80 км/ч. Это веселее. Naza имеет еще и экстремальный режим Manual — но это совсем страшно, можно реально куда-нибудь врезаться.
Пожалуй, я не буду здесь приводить инструкцию по настройке Naza — это весьма качественный продукт, имеющий даже видеомануалы на сайте. Скажу лишь о паре нюансов:
ПРЕЖДЕ ЧЕМ ЗАПУСКАТЬ КОПТЕР ХОТЬ НА МИНУТУ, УСТАНОВИТЕ РЕЖИМ ВЫКЛЮЧЕНИЯ МОТОРОВ INSTANT! INTELLEGENT MODE МОЖЕТ ПРИВЕСТИ К КРОВАВЫМ ПОСЛЕДСТВИЯМ ПРЯМО В КВАРТИРЕ — ВЫ ПРОСТО НЕ СМОЖЕТЕ ВЫКЛЮЧИТЬ МОТОРЫ, ЕСЛИ ЧТО-ТО ПОЙДЕТ НЕ ТАК. МНЕ ПОВЕЗЛО — МОЙ ПРИЯТЕЛЬ СРАЖАЛСЯ С МОДЕЛЬЮ ГОЛЫМИ РУКАМИ ДО ПОБЕДНОГО КОНЦА.
СДЕЛАЙТЕ КАЛИБРОВКУ ESC ПЕРЕД ПРОВЕРКОЙ КОПТЕРА. КАЖДЫЙ ESC ПОДКЛЮЧАЕТСЯ ПРЯМО К ПРИЕМНИКУ ДУ И КАЛИБРУЕТСЯ. БЕЗ КАЛИБРОВКИ НИКАКАЯ НАЗА НЕ СПАСЕТ, И КОПТЕР ПЕРЕВЕРНЕТСЯ ПРИ ЗАПУСКЕ. GOOGLE В ПОМОЩЬ.
Если первые 2 предупреждения обработаны, запуская моторы, проверьте, в каком направлении они вращаются. Должны вовнутрь с каждой стороны по направлению движения аппарата вперед-назад. В инструкции к контроллеру есть картинка как это должно выглядеть. Также можете увидеть правильный вариант на иллюстрации сверху, с типами коптеров. Нос там смотрит вверх.
Проверьте, что форма винтов соответствует их направлению вращения. Винты должны быть разные. 2 пары по 2 винта — прямые и обратные. При вращении винт должен тянуть коптер вверх, а не вниз.
При установке модуля GPS удостоверьтесь, что стрелочка на нем указывает на нос модели, равно как и стрелочка на корпусе самого контроллера, в противном случае произойдет неуправляемое крушение коптера через некоторое время после его запуска уже на летном поле.
Когда все готово, сделайте калибровку гироскопов и акселерометров с помощью Naza Assistant, там есть такой раздел.
В Naza Assistant есть еще и раздел настройки резкости управления электроники. По-умолчанию цифры не очень соответствуют нормальным для TBS Discovery. Вот варианты более подходящих комбинаций:
- Моторы 750KV: 134/109/93/198 и 183/143
- Моторы 900KV: 166/135/131/179 и 188/176
Расширенный список настроек в зависимости от ваших целей на английском NAZA gains database
Рекомендую также настроить каналы X1 и X2 на управление колесиками на пульте и на регулировку указанных выше параметров, чтобы подстроить электронику в тестовом полете.
Полезно будет настроить еще и Forced FailSafe на какой-либо тумблер, чтобы для возврата домой не приходилось выключать пульт. При этом обязательно настройте FailSafe на возврат домой + посадка, а не просто — посадка. Ниже несколько видео о настройке различных пультов. К сожалению, на английском.
Настройка Forced FailSave для Futaba T10CAP
Настройка Forced FailSave для Futaba 8FG
В инструкции по Naza есть раздел о настройке 1-го и 2-го уровней защиты при разрядке аккумулятора. Отнеситесь к этой процедуре внимательно, иначе коптер может упасть от внезапной потери тока или, наоборот, ложного срабатывания системы защиты.
Для защиты 1-го уровня указываете как напряжение без нагрузки, напряжение полностью заряженного аккумулятора, вычитая из него 1 вольт. Нагрузку ставите 0 — и летаете до срабатывания предупреждения. Запоминаете остаточное напряжение аккумулятора. Разница между установленным вами в настройках и реальным остаточным напряжением аккумулятора — это и есть потеря напряжения при нагрузке. Обычно, около 0.5 В. Записываете ее в соответствующее поле.
Аналогично поступаете и с защитой второго уровня. Там можно указать напряжение без нагрузки как номинал вашей батареи или чуть ниже. У меня для 3S-батареи установлено не на 11.1 В (номинал), а на 10.9 В — 0.6 В потерь при нагрузке. То есть коптер надо сажать при напряжении в 10.3 В под нагрузкой обязательно, иначе он сделает это сам.
Некоторые советы для TBS Discovery и не только:
- Для уменьшения вибрации используйте хорошие винты и балансируйте их
- Для увеличения продолжительности полетов используйте моторы с низким KV в сочетании с большими винтами. При этом отслеживайте потребление тока.
- Чтобы винты не попадали в кадр, для широкоугольных объективов используйте размер 8 дюймов, для среднего угла — 10 дюймов.
- 25A ESC более чем достаточно для этой платформы. Максимальный газ — это по 15A на мотор, а в среднем 10A.
- Для надежной установки ESC припаяйте 3.5 мм разъемы моторов прямо к платам регуляторов.
- Стандартные моторы DJI имеют вал 8 мм. Винты APC сделаны под 6 мм. и должны быть адаптированы. Винты Graupner встают как надо.
- Запрограммируйте ESC так: Break off, Battery type NiMh (для отключения функции остановки моторов с LiPo из-за низкого напряжения батареи), Cut-off type: soft cut, Cut-off voltage low, Aircraft type airplane, Start mode normal, Timing/response mode high (400 Hz), Governor off и все остальное тоже off
- Откалибруйте каждый ESC отдельно, подключая его к приемнику и упирая газ в верхний и нижний пределы до звуковых сигналов. Имейте в виду, что не подключенные к моторам ESC пищать не будут, т.к. не имеют встроенного динамика и пищат на самом деле моторами (как в детстве через моторчик у некоторых радио играло).
- Тяга винта влияет только на то, сколько он может тянуть, но не с какой скоростью. Таким образом, тяга влияет на ускорение, а kV на скоростные характеристики.
- Используйте только BEC на одном ESC для подключения 5-ти вольт, не используйте красный провод остальных трех ESC. Импульсные BEC выходят из строя при параллельном соединении.
- Результаты в eCalc должны показывать «over power». Поскольку винтов в мультикоптере много, нагрузка будет распределяться равномерно, и моторы будут предельно нагружаться только в пиковые моменты пилотажа.
- Если моторы глохнут, увеличьте напряжение в системе, например, вместо 3S- используйте 4S-батареи для увеличения крутящего момента моторов. Не спалите при этом ничего.
- Отбалансируйте моторы с помощью смартфона или другим известным способом.
- Настройте кривую газа таким образом, чтобы в среднем положении стика добиться некоторого пологого участка для упрощения контроля высоты полета.
- Ограничьте кривую газа 90% при верхнем положении стика. Это поможет контроллеру корректировать ваши действия даже на полном ходу аппарата, ведь остается 10%-ный резерв для автоматики.
- Чтобы сделать стики менее чувствительными ближе к центру, в режиме attitude используйте 30%-ную экспоненту для крена и тангажа, 10% для поворотов на вашем пульте ДУ, в rate mode используйте 50% для крена и тангажа, 20% для поворота
- Центр тяжести (CG, CoG) нужен для баланса распределения нагрузки на моторы
- Полетный контроллер необязательно должен размещаться в точке центра тяжести модели, на TBS Discovery закрепите его, как показано в инструкции
- Вы можете разместить полетный контроллер где пожелаете, а потом в его настройках компенсировать это недоразумение
- Если вы планируете летать внутри воздуховодов, добейтесь ювелирной точности управления при калибровке стиков в Naza Assistant. Перед калибровкой, установите предел хода стиков на пульте ДУ не 100%, а 140%. Это обеспечит большую разрешающую способность управляющего сигнала.
- Вы можете приспособить какой-нибудь тумблер на пульте для переключения между разными наборами пределов хода стиков. Например, 50%-ное управление креном и тангажом обеспечит значительно более плавный полет при условии, что при калибровке вы использовали пределы 100% или даже 140%.
- Заклейте места пайки чем-нибудь, чтобы в полете не закоротило.
- Для долгой службы литий-полимерных батарей установите предупреждение о разряде таким образом, чтобы оно срабатывало в момент падения напряжения на каждой ячейке до номинала 3.7 вольта, для 3S это 11.1 В. Для — 4S 14.8 В
- Если при просмотре записи видео вы наблюдаете эффект “Желе”, положите что-то мягкое между камерой и моделью.
- Если на видео при полете вы видите горизонтальные линии, подложите что-то другое, но тоже мягкое, под vTX (видео-передатчик на модели).
- Центр тяги находится на 15 см ближе к носу, чем центр тяжести модели.
- Если нос слишком тяжелый — это плохо, вас ушатает при полете по прямой, если хвост — это тоже плохо.
- Заклейте корпус контроллера Naza черной лентой по бокам, чтобы на ярком солнце модель не проседала по высоте, когда солнечные лучи проникают прямо внутрь.
- Если винты видно в кадре на камере GoPro, необязательно их подрезать, подложите 1.5 см. под камеру сзади.
- Если вы разорвали термоусадку на ESC для его программирования, наденьте на него новую. Подойдет 20-миллиметровая.
- Винты APC ведут себя также же, как на размер большие Graupner
- Следите за напряжением во время полета. В идеале совершать посадку при достижении номинального напряжения аккумулятора.
Дополнительную справку на английском языке можно получить здесь.
Конечно, Naza не является единственным полетным контроллером. Но если вы собираете коптер ради полетов сегодня, а не ради многонедельных танцев с паяльником и осциллографом, это, пожалуй — лучший выбор.
Если название Naza вам не по душе, для вас имеются следующие 32-битные аналоги:
- CC3D OpenPilot Летает хорошо. Настройка тяжелая. Сложно купить.
- Rabbit Flight Controller II Закрытая система. Для удержания высоты требуется сонар. Летает средненько, пока. По слухам, воруют код из MultiWii. Утилита настройки контроллера некоторым уж очень не нравится.
Если вы желаете рискнуть и попробовать 8-битную систему:
- AdruPilot Mega Сокращенно APM. Стоит как Naza. Одни говорят, что летает не хуже, другие, что хуже. В настоящий момент идет портирование на 32-битный контроллер. Для нормальных полетов требуется вдумчивая настройка множества параметров. Как понимаю, это функциональный аналог Wookong-М по стоимости Naza, который сложнее в настройке. Мое мнение такое — если вы зарабатываете на съемке деньги, можно вполне как поставить Wookong, так и «попотеть» и сэкономить, настроив APM. Решение это скорее экономическое, так как время, потраченное вами на настройку APM может стоить дороже разницы в цене контроллеров или же дешевле. Хотя, имея дорогой коптер, можно получить более интересные заказы. Да и уверенности в себе на переговорах будет у вас больше. Для FPV же функциональность Wookong/A2/APM явно избыточна.
- MultiWii Полетит хорошо, но через месяц после изучения мануалов и тюнинга PID. В посылке вы получите плату, для которой нужно делать виброразвязку и защиту бародатчика.
- Остальные 8-битные контроллеры проигрывают 32-битным системам по определению.
Некоторые профессионалы рекомендуют сначала практику на дешевом контроллере без специальных режимов. Я и сам попался на эту удочку, купив Hornet. Объясняю, почему этого делать не стоит:
- Покупая сначала дешевый контроллер, а потом хороший, вы переплатите за дешевый. В этом нет совершенно никакого смысла, т.к. хороший контроллер может работать в режиме дешевого. Так, у меня без дела лежит контроллер от Hornet, на котором я совершил всего пару вылетов. Зачем он мне?
- Вы можете разбить (и разобьете) квадрик с дешевым контроллером (если вовремя не купите нормальный). Это произойдет потому что вы будете летать без страховки. То есть при потере контроля над аппаратом никакой волшебной кнопки СТОП не будет. Хороший контроллер может принудительно зафиксировать коптер в воздухе нажатием одной кнопки (переключением тумблера). После передышки можно вернуться к полету прямо из этой точки.
- Практиковаться в ручных режимах без стабилизации новичку лучше на большой высоте, чтобы был запас в несколько секунд в случае непредвиденного поведения коптера. Взлетать на эту высоту лучше с помощью стабилизирующего режима, равно как и спускаться с нее. Если в вашем контроллере такого режима нет, вам страшно будет сразу подниматься на 20 метров и более. Вы будете летать по земле или около нее, что опасно и сложно, так как у земли сложнее контролировать высоту (появляется нижняя граница), на малой высоте значительно больше препятствий, а у поверхности еще и наблюдается эффект экрана, меняющий управление.
- Даже если вы сразу поставите на аппарат камеру, рано или поздно у вас все равно появится желание научиться управлять визуально. Только для этого у вас будут все необходимые инструменты. Вы сможете как включать стабилизацию, так и посматривать в монитор, в случае потери контроля над ориентацией аппарата относительно вас.
Подводя итоги, скажу вот что. Складывается впечатление, что люди, которые прошли сложным путем, не желают легких путей остальным. Сейчас на рынке, как понимаю, переходный период от энтузиастов-инженеров к профессионалам фото- и видеосъемки и любителям FPV. Это и порождает напряжения между разными поколениями. И это — нормально. Внутри поколения наблюдается разделение, аналогичное делению на пользователей iPhone и Android. Разница, на мой взгляд, в том, что DJI сегодня ближе к аналогии с iPhone, чем остальные к Android. Ведь продукты DJI прекрасно работают из коробки, а остальные контроллеры требуют подстройки под каждый конкретный аппарат. Возможно, что производители коптеров будут потом сами выпускать «оболочки» для коптеров на альтернативных контроллерах, упрощающие их использование, как это произошло с Android. Понятно, что инженеры из первого поколения не могут примериться с закрытостью и искусственными ограничениями решений от DJI, поэтому им ближе «Android». Ведь кто, если не они, сможет оптимизировать математические модели полетов, зашитые в открытые контроллеры.
![]()
Вот и подошла к завершению вторая часть моего поста. Вопросы, которые предстоит еще осветить, в основном касаются видео. Полный перечень того, что планируется в следующей части, такой:
- Подбор пульта управления и приемника его сигналов
- Механическая часть (винты)
- Аккумуляторы и зарядка
- Видео. Количество и тип видеокамер.
- Видео. Подвесы и кронштейны для камер.
- Видео. Передатчик и приемник.
- Видео. Очки и мониторы.
- Полетная информация на экране. Телеметрия. OSD.
- Поиск улетевшей модели. GPS-трекинг.
- Монтаж. Термоусадка, фильтры, экранирование и ферритовые кольца.
Источник: http://habrahabr.ru/post/197380/
#10
OFFLINE
-
- Пользователи
-

- 2 сообщений
Начинающий летчик
#11
OFFLINE
-

- Пользователи
-
- 59 сообщений
Летчик
- Город:Столица нашей Родины
#12
OFFLINE
-
- Пользователи
-
- 59 сообщений
Летчик
- Город:Столица нашей Родины
Отправлено 30 September 2014 - 07:12 AM
#13
OFFLINE
-

- Пользователи
-
- 75 сообщений
Летчик
- Город:Черкассы
Отправлено 14 April 2015 - 10:21 PM
Aerigon UAV установили 7 кг. камеру Phantom 4K , на коптер ,которая снимает 1000 кадров в секунду. Что из этого получилось, смотрите на видео. 
Сообщение отредактировал tiburon8: 14 April 2015 - 10:24 PM
#14
OFFLINE








Темы с аналогичным тегами коптеры, разные, самоделки, разработки, рамы, сборка, сравнения, обзоры



Количество пользователей, читающих эту тему: 1
0 пользователей, 1 гостей, 0 анонимных
