

Полезная информация!
Правила форума:
http://www.dji-club....ila-foruma/?p=3
Как пользоваться системой поиска на форуме:
http://www.dji-club....orume/?p=35047
Где находится файловый архив с инструкциями и программами:
http://www.dji-club....progra/?p=18011
=============================================================================================================
Рекомендации по строительству коптеров
Полтора года тому назад, меня в очередной раз заинтересовала задача создания беспилотного летательного аппарата вертикального взлета для видео наблюдения и видеосъемки. При этом хотелось сделать достаточно дешевый и простой в управлении аппарат. Наигравшись вертолетиками и квадрокоптером Gaui 330X в качестве базы был выбран проект Arducopter, как доступная по цене платформа с открытыми исходниками.
При проектировании коптера начинать следует с оценки веса будущего аппарата.
В качестве первой прикидки исходим из того, что вес полезной нагрузки – 30 % от взлетного веса. Батарея и собственно аппарат 30 % и 40 %. Проведем расчет для полезной нагрузки 400 грамм. Аккумулятор 5 А/час 3Sвесит около 400 грамм и имеет 5 А/ч*11 В = 55 Вт/ч энергии. Взлетный вес аппарата будет равен 1350 грамм. Учитывая , что отношение тяги винта к мощности находится в пределах 5-10 грамм на ватт, можно определить мощность в режиме висения.
При 10 гр/Вт необходимо 135 Вт. С учетом емкости батареи время полета – составит:
Т=8,25*Эф*Рбат/Рвзлет
где:
– Т – время в минутах
– Эф – отношение тяги винта к мощности в грамм/Вт
– Рбат – вес батареи
– Рвзлет – взлетный вес
Для приведенного примера Т=24,5 мин Практический результат = 20,5 мин. То есть реальная эффективность ниже .
Выбор винтов и моторов и регуляторов. Данные необходимые для выбора сведены в таблицу. Данные не являются бесспорными, так как оценки зачастую субъективны.
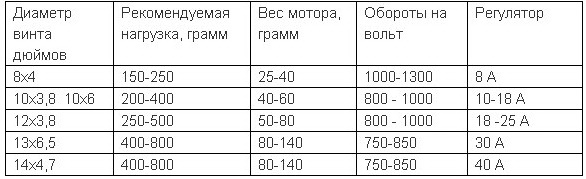
При использовании батареи 4S следует учитывать, что максимальные обороты увеличиваются на 30%.
При меньшей нагрузке на винт отношение тяги винта к мощности выше. Также выше это отношение для винтов с малым шагом (винты слоу флай). Но следует учитывать, что винты с малым шагом имеют более низкое значение допустимых оборотов (около 5-6 тыс. об/мин).
Тяга винта пропорциональна четвертой степени диаметра и квадрату оборотов.
Мощность= Ка*(тяга винта * диаметр винта) 2/3
Регуляторы.
После ряда экспериментов я остановился на регуляторах Turnigy plush (sentry) 12-30A.
Выбор определен в первую очередь низкой ценой и приемлемыми характеристиками. Основное требование к регулятору работа на повышенных частотах следования управляющих импульсов (200-495 Гц).
Пробовали регуляторы НК SS как более дешевую альтернативу. Применять можно, но они калибруются при каждом включении, что не всегда удобно.
Существующие регуляторы PWM не предназначены для квадрокоптеров.
Шина I2C в специализированных регуляторах не является определяющей для параметров регуляторов, основное то, что они умеют раскручивать мотор быстрее по сравнению с обычными в которых скорость раскрутки специально уменьшена, чтобы не ломались редукторы.
Одним из способов повышения скорости раскрутки винта является повышение частоты управляющих импульсов, что не гарантирует результата, но позволяет обмануть регулятор, настроенный на замедленную раскрутку винта. Еще одним существенным параметром связки мотор – регулятор – винт является линейность тяги от длительности импульса. В регуляторах Turnigy plush начальный участок более пологий.
Выбор конкретных моторов , пропеллеров и регуляторов дело личных предпочтений. Дорогие фирменные моторы лучше сбалансированы и меньше вибрируют, дешевые имеют более квадратные шарики, шумят и вибрируют больше, ломаются чаще. Дорогие винты более эффективны и надежны, дешевые менее эффективны и ломаются.
Что касается надежности, то на мой взгляд - моторы практически отказывать не должны так как работают на четверть мощости. Ломаться кроме подшипников там нечему, а внезапные отказы по подшипникам редкость. Регуляторы - слабое место и по нормальному те которые продаются будут гореть, так как с защитой у них практически никак. Снизить вероятность отказа можно поставив их с запасом и погонять с хорошей нагрузкой дабы выгорели бракованные.
Процессор по определению должен сбоить, а программа зависать. Но здесь надежность будет определятся грамотным монтажом и отработанностью кода. Винты понятно должны быть качественные и кроме того моторы не должны их раскручивать выше допустимых оборотов.
Шесть или восемь не очень принципиально и на надежность влиять сильно не должно.
Отдельно стоило бы рассмотреть вопрос устойчивости к остановке одного винта. Принципиально и шестерка и восьмерка может летать , но для этого настроить аппаратик нужно под такой режим и вот здесь если от регулятора идет информация о том как двигатель себя чувствует задача в плане программы проще. Или лепить самому какие нибудь датчики и информацию передавать в процессор. И после этого восьмерка и без двух винтов должна садиться. Можно попробовать и без этого, но что получится пока непонятно. Скорее всего без активного руления упадет.
Относительно стабильности.
Балансировка пропеллеров, жесткость конструкции, отбалансированные моторы (или хотя бы не очень кривые) влияют на вибрации. Стабильность же зависит от правильного подбора пары мотор-пропеллер и настройки. Можно настроить аппарат на вялые реакции от внешних воздействий а можно сделать его резким. В первом случае он будет стабильнее, но с ветром бороться будет хуже . Поэтому если порывов ветра не ожидается можно и так. И естественно более тяжелый и большой коптер будет стабильнее. Относительно гироскопов, то у меня сложилось впечатление, что если есть компенсация ухода по акселерометру и магнетометру, то качество средних гироскопов вполне удовлетворяет и на стабильность они влияют мало. То есть я еще не добрался до этого.
Еще один момент - это режим полета. Если летать с ручным управлением, то в основном влияет качество механики. Конечно если гироскопы не калибруются то и их уходы будет хорошо видно. В автомате же все зависит от настройки. Можно настроить на плавные реакции, но тогда с ветром бороться не будет. Если же настройка под предельные режимы то и шум высотомера и GPS будет его болтать, но с порывами бороться будет.
Выбор управляющей электроники в первую очередь определяется необходимой функциональностью и личными предпочтениями. Я выбрал проект Arducopter, как доступную по цене платформу с открытыми исходниками. Проект Wii заинтересовал как очень дешевая электроника с гироскопами и акселерометрами.








